|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
РАЗРАБОТКА СИСТЕМЫ СВЯЗИ ДЛЯ ПЕРЕДАЧИ НЕПРЕРЫВНЫХ СООБЩЕНИЙ ДИСКРЕТНЫМИ СИГНАЛАМИМежрегиональный центр переподготовки специалистов Курсовая работа По дисциплине: Теория электрической связи
РАЗРАБОТКА СИСТЕМЫ СВЯЗИ ДЛЯ ПЕРЕДАЧИ НЕПРЕРЫВНЫХ СООБЩЕНИЙ ДИСКРЕТНЫМИ СИГНАЛАМИ Выполнил: Лошков И.В. Группа: СБТ-23 Вариант:3
Проверил:
Новосибирск, 2014
СОДЕРЖАНИЕ

ВВЕДЕНИЕ
Задачей данной курсовой работы является разработка системы связи для передач непрерывного сообщения дискретными сигналами. Теория электрической связи является неотъемлемой частью общей теории связи и представляет собой единую научную дисциплину, основу которой составляют: теория сигналов, теория помехоустойчивости и теория информации. Принципы и методы курса ТЭС являются теоретической основой для развития инженерных методов расчёта и проектирования аналоговых и цифровых систем связи. Правильная эксплуатация систем связи также требует знания основ теории передачи сигналов, выбора оптимального режима работы, критериев оценки достоверности передачи сообщений, причин искажения сигналов и т.д.
Главными задачами данной курсовой работы являются: - изучение фундаментальных закономерностей, связанных с получением сигналов, их передачей по каналам связи, обработкой и преобразованием их в радиотехнических устройствах; - закрепление навыков и формирование умений по математическому описанию сигналов, определению их вероятностных и числовых характеристик; - выбор математического аппарата для решения конкретных научных и технических задач в области связи; видение тесной связи математического описания с физической стороной рассматриваемого явления.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Разработать обобщенную структурную схему системы связи для передачи непрерывных сообщений дискретными сигналами, разработать структурную схему приемника и структурную схему оптимального фильтра, рассчитать основные характеристики разработанной системы связи и сделать обобщающие выводы по результатам расчетов.
ИСХОДНЫЕ ДАННЫЕ
1. Номер варианта: N = 3. 2. Вид сигнала в канале связи: ДФМ. 3. Скорость передачи сигналов: V = 69000, Бод. 4. Амплитуда канальных сигналов: 5. Дисперсия шума: 6. Априорная вероятность передачи символов "1": p(1) =0,27 . 7. Способ приема сигнала: КГ. 8. Полоса пропускания реального приемника: 9. Значение отсчета принятой смеси сигнала и помехи на входе решающей схемы приёмника при однократном отсчете: 10. Значения отсчетов принятой смеси сигнала и помехи при приеме по совокупности трех независимых (некоррелированных) отсчетов 11. Максимальная амплитуда аналогового сигнала на входе АЦП: 12. Пик-фактор входного сигнала П =1,8. 13. Число разрядов двоичного кода (при передаче сигналов методом ИКМ): 14. Вид дискретной последовательности сложного сигнала:
1. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ СВЯЗИ
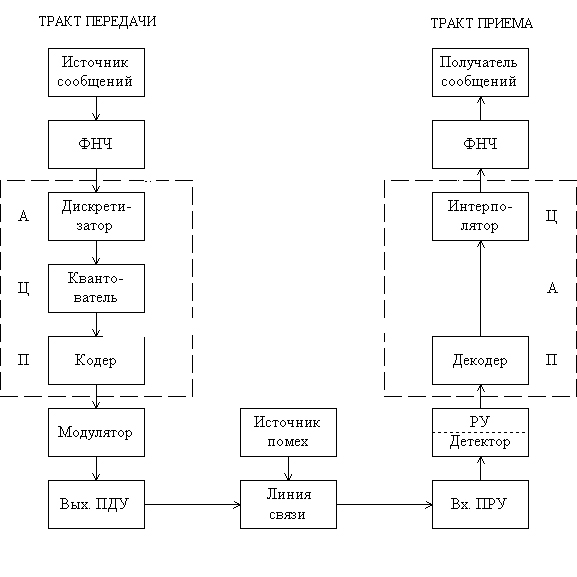
Совокупность технических средств, используемых для передачи сообщений, называется системой связи. Обобщенная структурная схема системы связи для передачи непрерывных сообщений дискретными сигналами приведена на рис. 1.1.
Рис. 1.1. Обобщенная структурная схема системы связи
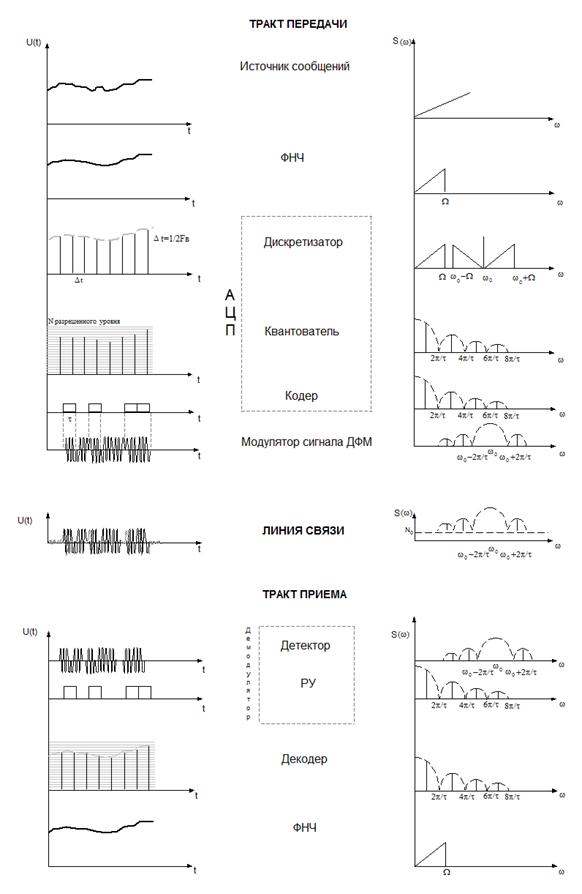
ТРАКТ ПЕРЕДАЧИ: Источник непрерывных сообщений - устройство, на выходе которого имеется непрерывный электрический сигнал. ФНЧ – фильтр нижних частот - ограничивает спектр сигнала по частоте, отфильтровывая высокочастотную составляющую сигнала. АЦП - аналого-цифровой преобразователь – осуществляет преобразование непрерывного первичного аналогового сигнала в цифровой. Преобразование осуществляется в три этапа: сначала непрерывное сообщение подвергается дискретизации по времени через интервалы Dt (по теореме Котельникова), полученные отчеты мгновенных значении квантуются (доводятся до определенного разрешенного уровня) и, наконец, полученная последовательность квантованных значении представляется посредством кодирования в виде последовательности кодовых комбинаций (обычно двоичным кодом). Такое преобразование называется импульсно-кодовой модуляцией (ИКМ). Модулятор – осуществляет преобразование сигнала в модулированный сигнал (в данном случае ФМ) с сохранением содержащейся в нем информации. На выходе модулятора имеем ДФМ – сигнал. При двоичной ФМ меняется фаза несущей на
Выходное устройство ПДУ - осуществляет фильтрацию и усиление модулированного колебания для предотвращения внеполосных излучений и для установления требуемого отношения сигнал/шум на входе приемника.
Далее сигнал поступает в линию связи, которая служит для передачи электрических сигналов от передатчика к приемнику. Это может быть кабель или волновод, в системах радиосвязи это область пространства в котором распространяются электромагнитные волны от передающей антенны к приемной. В лини связи сигналы обычно значительно ослабляются (затухают) и искажаются под воздействием помех.
ТРАКТ ПРИЕМА: Входное приемное устройство - осуществляет фильтрацию принятого сигнала, смеси переданного сигнала и помехи. Демодулятор, состоящий из детектора и РУ – решающего устройства. При демодуляции из принятого сигнала выделяется закон изменения информационного параметра, который в нашем случае пропорционален сигналу ИКМ. При этом для опознавания переданных двоичных символов на выход демодулятора подключается решающее устройство РУ. ЦАП – цифро-аналоговый преобразователь. Преобразует цифровой сигнал в исходный аналоговый. При этом в декодере по двоичным кодовым комбинациям восстанавливаются соответствующие уровни квантования. Интерполятор преобразует электрический сигнал в исходный непрерывный сигнал, путем «сглаживания» квантованных значений. Далее сигнал фильтруется и доставляется получателю сообщений.
На рис 1.2. приведены временные и спектральные диаграммы преобразования сообщения и сигналов в системе связи на выходе каждого блока системы связи.
Рис. 1.2. Временные и спектральные диаграммы преобразования сообщения и сигналов в системе связи на выходе каждого блока системы связи.
2. СТРУТУРНАЯ СХЕМА ПРИЕМНИКА ДФМ СИГНАЛА.
В разрабатываемой системе связи задана фазовая манипуляция. Выражение временной функции используемого сигнала:
Рис. 2.1. Векторная диаграмма сигнала ДФМ
Из рисунка видно, что расстояние между векторами Система ФМ – является оптимальной, когерентной системой передачи двоичных сигналов. По сравнению с ЧМ – ФМ обеспечивает при одинаковой помехоустойчивости двойной выигрыш по полосе частот и по мощности, занимаемой передаваемым сигналом. Так как при ФМ необходимо получать информацию о фазе принимаемого сигнала, то при этом приеме в обязательном порядке используют метод когерентного приема. Структурная схема приемника ДФМ представлена на рис. 2.2.
Рис. 2.2. Структурная схема приемника ДФМ сигнала.
Ф – полосовой фильтр; ФД – фазовый детектор; Г – гетеродин; ФНЧ - фильтр нижней частоты; РУ - решающее устройство; СУ – сравнивающее устройство; ПЗ – полоса задержки. Полосовой фильтр предназначен для предварительной фильтрации сигналов, для уменьшения влияния помех, с полосой пропускания
3. ПРИНЯТИЕ РЕШЕНИЯ ПРИЕМНИКОМ ПО ОДНОМУ ОТСЧЕТУ.
Сообщения передаются последовательностью двоичных символов «1» и «0», которые появляются с априорными вероятностями соответственно p(1)=0,27 и p(0)=0,73. В канале связи на передаваемые сигналы воздействует гауссовский стационарный шум с дисперсией Отношением правдоподобия называется величина, определяемая выражением:
где Таким образом, отношение правдоподобия есть величина, равная отношению плотности вероятности того, что принятый сигнал Свою очередь, выражение, стоящее справа называется пороговым отношением правдоподобия:
где
Приемник, использующий отношение правдоподобия, работает следующим образом. 1. Анализируя поступающий на его вход сигнал, вычисляет отношение правдоподобия 2. По известным значениям 3. Величина Согласно критерию идеального наблюдателя, весовые коэффициенты
Критерий идеального наблюдателя широко применяется в системах связи, когда искажения любого сигнала одинаково нежелательны.
Плотности вероятностей найдём по формулам:
Для вычисления плотности распределения помехи применим формулу:
Отношение правдоподобия:
Пороговое отношение правдоподобия:
Т.к.
Т.к. передача символа «0» соответствует паузе, то в этот момент в канале присутствует только помеха (мощность сигнала в паузе равна нулю), а, следовательно, плотности распределения огибающей помехи Рассчитаем и построим функции распределения плотности вероятности для W(x), W(z/0) и W(z/1).
Таблица 1.
Таблица 2
Рис. 3.1. Графики распределения плотности вероятностей W(Z/0), W(Z/1)
Рис. 3.2. График плотности распределения помехи.
4. ВЕРОЯТНОСТЬ ОШИБКИ НА ВЫХОДЕ ПРИЕМНИКА.
Рассчитаем вероятность неправильного приема двоичного символа в рассматриваемом приемнике. Прием сигналов вида ДФМ возможен только с помощью синхронного (когерентного) детектора. Вероятности переходов р(1/ 0) и р(0 /1) при флуктуационной помехе в канале связи одинаковы и равны. Вероятность ошибки вычисляется следующим образом:
где Вычислим отношение сигнал/шум:
Вычислим
Построим график Таблица 3
Рис. 4.1. Зависимость вероятности ошибки от отношения сигнал/шум
5. ВЫИГРЫШ В ОТНОШЕНИИ СИГНАЛ/ШУМ ПРИ ПРИМЕНЕНИИ ОПТИМАЛЬНОГО ПРИЕМНИКА
Наибольшее отношение сигнал/помеха, равное отношению энергии сигнала к спектральной плотности флуктуационной помехи В предположении оптимального приема (фильтрации) сигналов определим: a) Максимально возможное отношение сигнал/шум.
где
Отсюда, максимально возможное отношение сигнал/шум:
Отношение сигнал/шум:
b) Выигрыш в отношении сигнал/шум оптимального приемника по сравнению с рассчитываемым приемником:
Итак, энергетический выигрыш в отношении сигнал/шум оптимального приемника по сравнению с рассчитываемым демодулятором составляет практически 2 раза.
6. МАКСИМАЛЬНО ВОЗМОЖНАЯ ПОМЕХОУСТОЙЧИВОСТЬ ПРИ ЗАДАННОМ ВИДЕ СИГНАЛА
Помехоустойчивостью системы связи называется способность системы различать (восстанавливать) сигналы с заданной достоверностью. Задача определения помехоустойчивости всей системы в целом весьма сложна. Поэтому часто определяют помехоустойчивость отдельных звеньев системы: приемника при заданном способе передачи, системы кодирования, или системы модуляции при заданном способе приема и т. д. Максимально возможная помехоустойчивость при заданном характере помех называется (по Котельникову) потенциальной помехоустойчивостью. Сравнение потенциальной и реальной помехоустойчивости устройства позволяет дать оценку качества реального устройства и найти еще неиспользованные резервы. Зная, например, потенциальную помехоустойчивость приемника, можно судить, насколько близка к ней реальная помехоустойчивость существующих способов приема и насколько целесообразно их дальнейшее усовершенствование при заданном способе передачи. Условия, при которых она достигается: Приемник должен быть оптимальным (воспроизводящий передаваемое сообщение наилучшим образом в смысле выбранного критерия, отношение сигнал/шум должно быть максимальным).
Для определения потенциальной помехоустойчивости приема символов определим среднюю вероятность ошибки при оптимальном приеме для заданного вида сигнала (ДФМ):
7. ПРИНЯТИЕ РЕШЕНИЯ ПРИЕМНИКОМ ПО ТРЕМ НЕЗАВИСИМЫМ ОТСЧЕТАМ
Т.к. решение о переданном символе принимается по совокупности трех отсчетов, то для нахождения отношения правдоподобия требуется найти трехмерную плотность вероятностей. Учитывая, что отсчеты независимы, эти отсчеты можно считать независимыми. В этом случае трехмерная плотность вероятностей равна произведению одномерных плотностей:
Таким образом,
Отношение правдоподобия
Сравним полученное значение с пороговым отношением правдоподобия Т.к.
8. ВЕРОЯТНОСТЬ ОШИБКИ ПРИ ИСПОЛЬЗОВАНИИ МЕТОДА СИНХРОННОГО НАКОПЛЕНИЯ Сущность метода состоит в том, что сигнал или его элементы многократно повторяются. На приеме отдельные образцы сигнала сличаются (обычно суммируются), и так как различные образцы по-разному искажаются помехой в силу независимости помехи, то можно восстановить переданный сигнал с большой достоверностью. При сложении одинаковых сигналов суммарный сигнал будет иметь в n раз большую амплитуду, т.е. в n2 большую мощность, чем отдельный сигнал:
где n - количество отсчетов. А мощность помехи равна:
то есть помеха суммируется по мощности (т. к. некоррелированная). В результате отношение мощности сигнала к мощности помехи увеличивается в n раз (3 раза).
Расчет средней вероятности ошибки в приемнике, использующем метод синхронного накопления: при n=3,
При этом средняя вероятность ошибки значительно уменьшилась.
При использовании данного метода помехоустойчивость увеличивается в 50 раз. В методе синхронного накопления амплитуда возросла в n раз, т.е., в нашем случае, в 3 раза. Помеха в разных сечениях имеет разные фазы и возрастает по мощности в 3 раза. Однако, сигнал накапливается лучше, чем помеха. За счет этого повышается помехоустойчивость системы.
9. ПРИМЕНЕНИЕ ИМПУЛЬСНО-КОДОВОЙ МОДУЛЯЦИИ ДЛЯ ПЕРЕДАЧИ АНАЛОГОВЫХ СИГНАЛОВ.
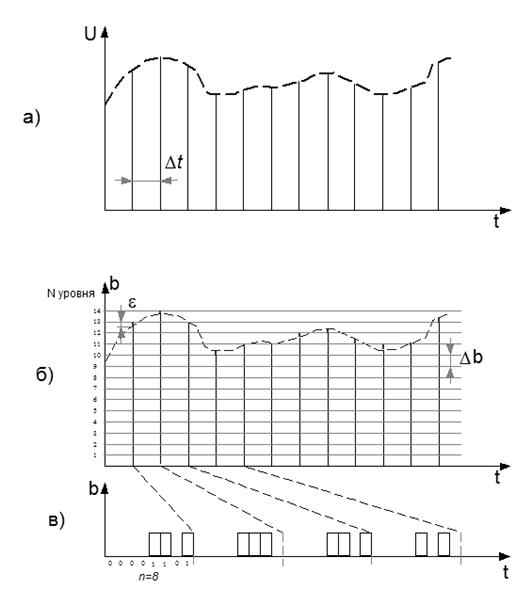
При ИКМ отсчеты аналогового АИМ сигнала преобразуются в последовательность кодовых групп, состоящих из двоичных символов. Для осуществления ИКМ необходимо выполнить три операции: 1) дискретизацию сигналов по времени (получение сигнала АИМ); 2) квантование полученных импульсов по амплитуде; 3) кодирование квантованных по амплитуде импульсов.
Рис. 9.1. Преобразование сигналов при ИКМ а) дискретизация; б) квантование; в) кодирование
1. Дискретизация – превращение первичного (аналогового) сигнала в короткие импульсы с амплитудами, равными значениям первичного сигнала в моменты отсчета. Интервал дискретизации определяется по теореме Котельникова: 2. Квантование – округление амплитуд импульсов до ближайшего разрешенного уровня. Разрешенные уровни определяются: Δb – шагом квантования. Полученные квантовые значения должны быть кратны шагу квантования. Такое округление сопровождается погрешностью:
Погрешность при представлении сигнала e, не превышает половины шага квантования Δb. Число уровней квантования:
где Если L не равно целому числу, то его округляют до ближайшего целого большего числа.
3. Кодирование – представление номера уровня импульса определенным двоичным кодом.
где m – основание кода - число возможных элементарных посылок. В двоичном коде m=2 n - число разрядов в кодовой комбинации
Достоинством ИКМ является высокая помехоустойчивость, которая достигается за счет расширения спектра ИКМ сигнала по сравнению c исходным спектром сообщения. В настоящее время не существует систем модуляции, более близких к идеальной, если спектр передаваемого сообщения равномерный. Поэтому система с ИКМ широко используется в тех случаях, когда высокую верность необходимо обеспечить с минимальной затратой мощности передатчика. Повышение верности передачи непрерывных сообщений в системах с ИКМ может быть достигнуто применением помехоустойчивого кодирования. Высокая помехоустойчивость цифровых систем передачи позволяет осуществить практически неограниченную по дальности связь при использовании каналов сравнительно невысокого качества. Недостатком ИКМ является наличие шума квантования, который обусловлен тем, что преобразование непрерывных сообщений в цифровую форму в системах ИКМ сопровождается округлением мгновенных значений до ближайших разрешенных уровней квантования.
Рассчитаем мощность шума квантования и отношение сигнал/шум квантования для случая поступления на вход приемника сигнала с максимальной амплитудой, равной Число уровней квантования:
Шаг квантования:
Средняя мощность шума квантования:
Мощность сигнала:
Отношение сигнал/шум:
Выбор значения шага квантования производится таким образом, чтобы, с одной стороны – минимизировать шумы квантования, с другой стороны – упростить реализацию устройства. Уменьшение шума квантования напрямую связано с уменьшением значения шага квантования.
10. ИСПОЛЬЗОВАНИЕ СЛОЖНЫХ СИГНАЛОВ И СОГЛАСОВАННОГО ФИЛЬТРА
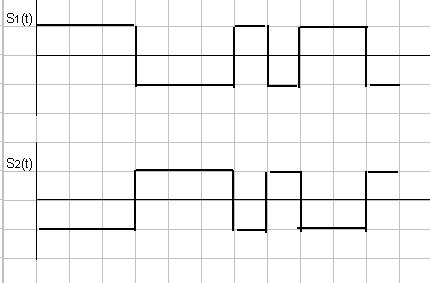
Решение проблемы повышения помехозащищенности систем связи и управления достигается использованием различных методов и средств, в том числе и сигналов сложной формы (с большой базой). Широкое практическое применение нашли сигналы на основе дискретных кодовых последовательностей, которые представляют собой последовательности символов длительностью Т, принимающих одно из двух значений: +1 или -1. Такие сигналы легко формируются и обрабатываются с использованием элементов цифровой и вычислительной техники. Сложные сигналы должны удовлетворять ряду требований для достижения набольшей достоверности их приема: а) корреляционная функция должна содержать значительный максимум (пик); б) взаимная корреляционная функция любой пары сигналов из используемого ансамбля, определяющая степень их ортогональности, должна быть близка к нулю. Достоинства и недостатки такие же, как и у ИКМ сигналов. Влияние помехи в линии связи на передаваемый сигнал будет проявляться в изменении знака (полярности) элемента дискретного сигнала, т.е. в переходах вида 1 Использование для передачи сложных сигналов обеспечивает эффективную защиту от импульсных, а иногда и от сосредоточенных помех. Изобразим форму заданных сигналов при передаче по каналу связи символов «1» и «0» в предположении, что
Рис. 10.1. Форма заданных сигналов при передаче по каналу связи
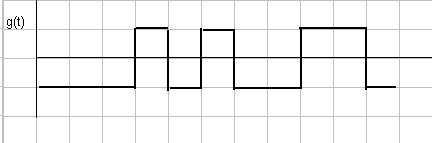
11. ИМПУЛЬСНАЯ ХАРАКТЕРИСТИКА СОГЛАСОВАННОГО ФИЛЬТРА
Импульсной характеристикой согласованного фильтра (СФ) называется реакция СФ при подаче на его вход
Для СФ импульсная характеристика - зеркальное отображение сигнала, с которым он согласован, сдвинутое на время
Импульсная характеристика фильтра, согласованного с
Рис.11.1. Форма импульсной характеристики СФ
12. СХЕМА СОГЛАСОВАННОГО ФИЛЬТРА ДЛЯ ПРИЕМА СЛОЖНЫХ СИГНАЛОВ. ФОРМА СИГНАЛОВ НА ВЫХОДЕ СОГЛАСОВАННОГО ФИЛЬТРА ПРИ ПЕРЕДАЧЕ СИМВОЛОВ «1» И «0».
Приведем схему СФ для заданного сигнала
выход фильтра
Рис. 12.1. Структурная схема согласованного фильтра
СФ для дискретных последовательностей может быть реализован в виде линии задержки с отводами (с общим временем задержки, равным длительности сигнала Тс), фазовращателей (инверторов) в отводах и суммирующей схемы, на выходе которой возникает импульс, равный сумме амплитуд всех элементов сигнала. Устройства, реализующие согласованную фильтрацию дискретных сигналов, могут быть выполнены также и на основе регистра сдвига с количеством разрядов, равным количеству элементов в кодовой последовательности сигнала. В нем имеются перемножители и сумматоры. На вход перемножителей поступает принимаемая последовательность с разрядов регистра сдвига и опорная последовательность, совпадающая по виду с импульсной характеристикой входного сигнала, с эталонного регистра. Сигналы с выходов всех разрядов перемножителей поступают на сумматор. Очевидно, что максимальный отклик на выходе сумматора будет наблюдаться тогда, когда кодовая последовательность полностью будет введена в регистр сдвига, т.е. в момент окончания входного сигнала. Сигнал на выходе сумматора будет иметь вид ступенчатой функции. После сумматора может быть установлен интегратор, например, простейшая RC-цепочка, для «сглаживания» сигнала. Т.к. СФ является коррелятором, то при подаче на его вход сигнала S(t), с которым он согласован, на выходе получим функцию корреляции входного сигнала:
При воздействии на вход СФ флуктуационной помехи, функция взаимной корреляции равна нулю, т.к. сигнал и помеха являются независимыми функциями времени. Но так как для вычисления функции взаимной корреляции требуется бесконечно большое время интегрирования, а в нашем случае оно ведется за время T, то здесь она отлична от нуля.
При передаче сигнала «1» передается последовательность вида:
Пример расчета формы сигнала на выходе СФ:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 .
. .
.
 .
. ,
,  ,
, 
 .
. .
.

 при каждом переходе от «1» к «0» и от «0» к «1».
при каждом переходе от «1» к «0» и от «0» к «1».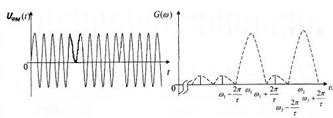


 и
и  равно длине вектора
равно длине вектора  . Энергия пропорциональна квадрату разности сигналов.
. Энергия пропорциональна квадрату разности сигналов.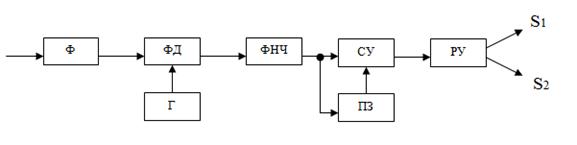
 , в присутствии только гауссовских помех не обязателен. Фазовый детектор используется в качестве корректора. Фильтр нижних частот - интегратора. Опорный гетеродин - генератор, частота и фаза колебаний которого полностью совпадают с частотой и фазой одного из сигналов.
, в присутствии только гауссовских помех не обязателен. Фазовый детектор используется в качестве корректора. Фильтр нижних частот - интегратора. Опорный гетеродин - генератор, частота и фаза колебаний которого полностью совпадают с частотой и фазой одного из сигналов. . Приемник, оптимальный по критерию идеального наблюдателя (минимума средней вероятности ошибки), принимает решение по одному отсчету смеси сигнала и помехи
. Приемник, оптимальный по критерию идеального наблюдателя (минимума средней вероятности ошибки), принимает решение по одному отсчету смеси сигнала и помехи  на интервале элемента сигнала длительности T.
на интервале элемента сигнала длительности T. ,
,  - плотность вероятности того, что принятый сигнал
- плотность вероятности того, что принятый сигнал  образовался при передачи сигнала
образовался при передачи сигнала  .
. ,
,  ,
,  - априорные вероятности,
- априорные вероятности, ,
,  - весовые коэффициенты.
- весовые коэффициенты. .
. .
. сравнивается с
сравнивается с 
 . Тогда пороговое отношение правдоподобия принимает вид:
. Тогда пороговое отношение правдоподобия принимает вид:


 .
.
 , приемник выдает сигнал S2 и на выходе решающего устройства будет зарегистрирован «0».
, приемник выдает сигнал S2 и на выходе решающего устройства будет зарегистрирован «0». и огибающей сигнала + помеха при передаче «0»
и огибающей сигнала + помеха при передаче «0»  будут совпадать. Что наглядно подтверждается графиками (рис. 3.1, 3.2).
будут совпадать. Что наглядно подтверждается графиками (рис. 3.1, 3.2).
 ,
, – отношение сигнал / шум
– отношение сигнал / шум - табулированный интеграл вероятностей.
- табулированный интеграл вероятностей.
 :
:
 и укажем на нем точку
и укажем на нем точку  соответствующую
соответствующую  (рис. 4.1).
(рис. 4.1).
 , обеспечивают так называемые оптимальные фильтры.
, обеспечивают так называемые оптимальные фильтры. ,
, - энергия элемента сигнала;
- энергия элемента сигнала; - спектральная плотность помехи;
- спектральная плотность помехи; - длительность элемента сигнала.
- длительность элемента сигнала.




 ,
,
 ,
, ,
, ;
;

 - ошибка (или шум) квантования.
- ошибка (или шум) квантования. ,
, – максимальное значение непрерывного (первичного) сигнала.
– максимальное значение непрерывного (первичного) сигнала. ,
, и
и  .
.

 -1, -1
-1, -1  , при этом длительность каждого из сигналов равна
, при этом длительность каждого из сигналов равна  , где
, где  – число элементов сложного сигнала:
– число элементов сложного сигнала:
 - функции.
- функции. .
. ,
, 
 :
:

 вход
вход











