|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ ⇐ ПредыдущаяСтр 3 из 3 Теоретическое обоснование Кинематический анализ механизмов – это один из видов исследования механизмов, выполняемый без учета силовых факторов, действующих на их звенья в функции времени.5 Целью кинематического анализа является определение величин, направлений действия и закономерностей изменения кинематических параметров исследуемого механизма в функции времени.5 В рамках кинематического анализа плоских рычажных механизмов решаются следующие задачи:5 1) выявление возможных положений всех звеньев механизма за рассматриваемый промежуток времени; 2) определение величин линейных и относительных скоростей характерных точек механизма, а также выявление значений и направлений угловых ускорений всех звеньев; 3) определение величин линейных и относительных ускорений характерных точек механизма, а также выявление значений и направлений угловых ускорений всех звеньев. При кинематическом анализе используются аналитический, графический и графоаналитический методы. К графоаналитическим методам кинематического анализа относятся: метод кинематических планов (метод планов); метод кинематических диаграмм (метод диаграмм).1 Построение планов скоростей и ускорений выполняется в соответствующем масштабном коэффициенте и основано на графическом решении векторных уравнений распределения величин скоростей и ускорений между характерными точками механизма.1 План ускорений – это пучок векторов, выполненный в определенном масштабном коэффициенте, лучи которого изображают векторы абсолютных ускорений характерных точек механизма, а отрезки, соединяющие их вершины соответствуют векторам относительных ускорений.1  Угловое ускорение – это отношение тангенциального (касательного) ускорения звена механизма к действительной длине этого звена.1 Определение скоростей и ускорений подобных точек осуществляется по теореме подобия, которая формулируется следующим образом:1 Отрезки, соединяющие точки на схеме (плане положений) механизма, и отрезки, соединяющие одноименные точки на планах скоростей или ускорений, образуют подобные фигуры. Задача 4. Вариант 1.Считая угловую скорость кривошипа 1 постоянной величиной, выполнить кинематический анализ плоского рычажного механизма графоаналитическим методом. Определить угловые скорости и ускорения всех звеньев механизма, а также скорость и ускорение точки С. Дано: lOA = 0,15 м, lAB = 0,70 м, lBC= 0,35 м,
Рисунок 4 План скоростей ml=0,01 м/мм
P
Решение Кинематический анализ плоского рычажного механизма выполним методом планов скоростей. Определим скорости конца кривошипа: 1. VA= w1 × lOA = 0,87*0,15 = 0,1305 м/с, где w1 = Вектор скорости конца кривошипа направлен перпендикулярно оси кривошипа в сторону его вращения, т. е.
2. VB= w1 × lAB = 0,87*0,7 = 0,609 м/с, где w1 = Вектор скорости конца кривошипа направлен перпендикулярно оси кривошипа в сторону его вращения, т. е.
3. Vс= w1 × lВС = 0,87*0,35 = 0,3045 м/с, где w1 = Вектор скорости конца кривошипа направлен перпендикулярно оси кривошипа в сторону его вращения, т. е.
При длине отрезка (
Скорость точки C определим, воспользовавшись теоремой подобия, из пропорции:
Определим величины и направления угловых скоростей звеньев:
где
где
где Направления угловых скоростей звеньев показаны на схеме механизма. Ответ: Вывод. Для решения данной задачи нам необходимо было: по заданной кинематической схеме механизма понимать, как он работает и какое движение совершают его отдельные звенья; знать, как определяются скорости отдельных точек (по модулю и по направлению) при различных видах движения звеньев механизма; знать теорему подобия планов скоростей и правильно ее использовать.В итоге, используя построенный план скоростей, мы определили угловые скорости звеньев (по модулю и по направлению).
ЗАКЛЮЧЕНИЕ Результатом выполнения данной курсовой работы явилось освоение основных положений теории механизмов и машин. В данной курсовой работе мы рассмотрели такие методы, как структурный анализ плоских механизмов, определение подвижности и маневренности механизма, метрический синтез плоских рычажных механизмов, а также кинематический анализ плоских рычажных механизмов. Приобретены навыки в применении этих методов к исследованию и проектированию кинематических схем механизмов и машин различных типов. Курсовая работа позволила закрепить теоретические знания, а также применить знания к комплексному решению конкретной инженерной задачи по исследованию и расчету механизмов машин.
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И.И. Теория механизмов и машин: учебник для студентов ВТУЗов /Иван Иванович Артоболевский - Изд. 4-е, перераб. и доп. – Москва: Наука. Главная редакция физико-математической литературы. 1986. – 639. 2. Курсовое проектирование по теории механизмов и машин. Учеб. пособие/ В.Н.Ешкибаров, И.В.Левищев.-Барнаул: Изд-во Алтайского государственного аграрного университета, 2006. 3. Артоболевский И.И. Сборник задач по теории механизмов и машин: учебное пособие для ВУЗов / И.И. Артоболевский, Б. Эдельштейн - Изд. 2-е. – Москва: Наука. 1975. – 256 с. 4. Юдин В.А. Сборник задач по теории механизмов и машин: учебное пособие для ВТУЗов / В.А. Юдин, Г.А. Барсов, Ю.Н. Чупин: по ред. Л.В. Петросака – 2 изд. Перераб. и доп. – Москва. Высшая школа. 1982. – 215 с. 5. Теория механизмов и машин. Версия 1.0 [Электронный ресурс] : практикум / П. Н. Сильченко, М. А. Мерко, М. В. Меснянкин и др. – Электрон. дан. (2 Мб). – Красноярск: ИПК СФУ, 2008.
|
||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 544. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 n = 500 об/мин.
n = 500 об/мин.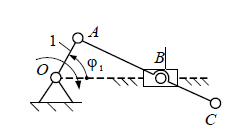



 = 0,87 рад/с – заданная угловая скорость кривошипа 1,
= 0,87 рад/с – заданная угловая скорость кривошипа 1, 
 .
.
 .
.
 .
.
 ) = 32 мм, масштабный коэффициент плана скоростей будет:
) = 32 мм, масштабный коэффициент плана скоростей будет:
 , (ac=20 мм). Следовательно:
, (ac=20 мм). Следовательно: 


 , (ab = 13,3 мм);
, (ab = 13,3 мм);
 , (вс = 25 мм);
, (вс = 25 мм);
 , (oa = 15 мм).
, (oa = 15 мм). ,
,  ,
,  ,
,  .
.