|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Метод дифференциального поглощения.Стр 1 из 2Следующая ⇒ Им. Д.Ф.Устинова «ВОЕНМЕХ» Курсовая работа на тему:
«Исследование возможности детектирования основных загрязняющих веществ в зоне аэропорта с помощью лидара дифференциального поглощения»
Выполнила студентка группы М-362 Третьякова А.Д.
Научный руководитель Коняев М.А. Санкт-Петербург Г. Содержание 1. Введение………………………………………………………………………..3 2. Анализ основных загрязнителей……………………………………………...4 3. Метод дифференциального поглощения……………………………………..5 3.1. Детектирование молекулы СО2……………………………………….12 3.2. Детектирование молекулы СО………………………………………..16 3.3. Детектирование молекулы NO2………………………………………18 4. Выводы………………………………………………………………………...20 5. Список используемых источников………………………….……………….21
Введение.
Проблема эмиссии вредных веществ авиации – сейчас одна из важнейших проблем. В последние годы выбросы вредных газов в атмосферу только растут, что вызывает беспокойство экологов. На выбросы загрязняющих веществ от авиации приходится около 3% общего объема выбросов газов, вызывающих парниковый эффект в Европе, однако их уровень повышается быстрыми темпами (на 87% с 1990 года), поскольку перелеты становятся дешевле, а затраты, связанные с охраной окружающей среды, при этом не учитываются. Проблема эмиссии вредных веществ: • эмиссия несгоревших углеводородов (НС); • эмиссия оксида углерода (СО); • эмиссия оксидов азота (NOх).  В связи с тем, что авиация активно способствует глобальному потеплению, одной из основных, если не самой важной является проблема эмиссии вредных веществ от авиационных выбросов. В настоящее время нормируется эмиссия несгоревших углеводородов (НС), оксида углерода (СО), оксидов азота (NOх) от турбореактивных и турбовентиляторных двигателей гражданских самолетов в зоне аэропортов, а также запрещается преднамеренный выброс топлива после остановки двигателя. Наибольшее загрязнение окружающей среды происходит в зоне аэропортов во время посадки и взлёта самолётов, а также во время прогрева их двигателей. При работе двигателей на взлёте и осадке в окружающую среду поступает наибольшее количество оксида углерода и углеводородных соединений, а в процессе полёта – максимальное количество оксидов азота. Оценка суммарного количества основных загрязнителей, поступающих в воздушную среду контролируемой зоны аэропорта гражданской авиации в результате его производственной деятельности (без учёта загрязнения воздуха спец автотранспортом и другими наземными источниками), показывает, что на площади около 4 км выделяется в атмосферу за 1 сутки от 1000 до 1500 кг оксида углерода, 300 – 500 кг углеводородных соединений и 50 – 80 кг оксидов азота. Такое количество выделяемых вредных веществ при неблагоприятном сочетании метеорологических условий может приводить к повышению их концентраций до значительных величин. При полёте в нижних слоях стратосферы двигатели сверхзвуковых самолётов выделяют оксиды азота, что ведёт к окислению озона. В стратосфере происходит интенсивное взаимодействие солнечных лучей с молекулами кислорода. В результате молекулы распадаются на отдельные атомы, а те, присоединяясь к сохранившимся молекулам кислорода, образуют озон. Область повышенной концентрации озона, так называемая озоносфера, которая приходится на высоты 20 – 25 км, играет очень важную роль для Земли. Поглощая почти всю ультрафиолетовую радиацию, озон, тем самым, предохраняет живые организмы от гибели.
Анализ основных загрязнителей. Показатели выброса загрязняющих веществ основных типов авиационных двигателей отечественного производства.
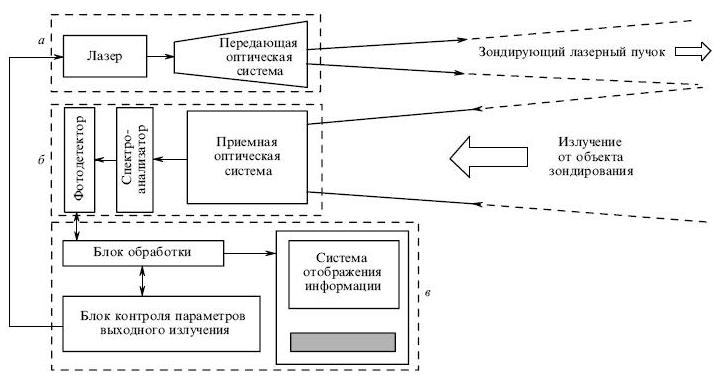
Метод дифференциального поглощения. Метод дифференциального поглощения основан на явлении резонансного поглощения лазерного излучения внутри контура линии поглощения исследуемого газа. Концентрация газа вычисляется при использовании сигналов на двух близких частотах, одна из которых находится внутри линии поглощения, а другая - вне ее. Представим, что в атмосферу посылаются импульсы от лазера, генерирующего ультрафиолетовое излучение на длинах волн 308 и 353 нанометра. Излучение на первой длине волны будет поглощаться молекулами озона более чем в тысячу раз сильнее по сравнению со второй. Поэтому сигналы их обратного рассеяния окажутся различными. Теоретические методы позволяют, сравнивая величины этих сигналов, найти концентрацию озона на выбранной высоте атмосферы. А анализируя изменение величин сигналов обратного рассеяния с высотой, можно определить и распределение концентрации молекул озона по трассе лазерного луча. И что очень важно, метод дифференциального поглощения позволяет определить уже единицы - десятки молекул газа на триллион молекул воздуха. А так как каждый газ в силу "оригинальности" собственной молекулы имеет различные участки поглощения по шкале длин волн, сейчас проводятся измерения концентрации практически всех малых газовых примесей, присутствующих в воздушном бассейне, в том числе и газов антропогенного происхождения. Для зондирования этим методом всех загрязнителей необходимо несколько лазерных источников, перекрывающих широкий спектральный диапазон - от УФ до ИК области. Кроме того, некоторые газы имеют очень узкие линии поглощения, так что для их зондирования методом ДП требуются специфические перестраиваемые лазеры, которые должны иметь достаточно узкую линию излучения и высокую стабильность длины волны генерации. Известно, что максимум информации при дистанционном определении состава и состояния атмосферы с высокими пространственно-временным разрешением и чувствительностью можно получить лишь оптическим методом с использованием лазеров, т. е. лидаром. Термин «лидар» является аббревиатурой английского выражения light identification, detection and ranging (оптическая идентификация, обнаружение и локация). Большинство лидаров состоит из трех основных частей: передающей, приемной и системы управления. На рис.1 показаны элементы и принцип работы лидаров. Передающая часть лидара обычно содержит лазерный источник и оптическую систему для формирования выходного лазерного пучка, т. е. для управления размером выходного пятна и расходимостью пучка. Рассеянное в исследуемом объеме излучение собирается телескопом и регистрируется чувствительным фотоприемником. В лидарной системе необходим также элемент, осуществляющий частотную дискриминацию собираемых сигналов. Этот элемент выделяет из всего принимаемого сигнала излучение с заданной длиной волны. Таким элементом может служить интерференционный узкополосный фильтр с высоким уровнем режекции помехи, а в ряде случаев - монохроматор. Оптические сигналы после оцифровки поступают в компьютер для их обработки и сохранения.
Рис. 1. Принципиальная схема лидара: передающая часть (а), приемная часть (б) и система управления (в).
Большую часть задач атмосферного зондирования, включая те, в которых присутствует дифференциальное поглощение лазерного излучения, можно описать с помощью лидарного уравнения. В случае импульсной системы, работающей в моностатическом режиме, возрастание мощности сигнала ΔP(λ, R), воспринимаемого детектором в волновом диапазоне (λ, λ+Δλ) от элемента, расположенного в интервале (R, R+ΔR), определяется как
Здесь J(λ, R, r) – индуцированная лазером спектральная плотность энергетической яркости на длине волны λ элемента площади объекта, положение которого определяется радиусом - вектором r в слое единичной толщины, расположенном на расстоянии R от лидара; dA (R, г) — элемент площади объекта в положении r на расстоянии R от лидара; ρ (λ,R,r)— вероятность попадания излучения с длиной волны λ, исходящего с элемента площади dA(R, r), на детектор. На эту вероятность влияют многие факторы, включая геометрические особенности задачи, ослабляющее влияние атмосферы, оптику приемного устройства, характеристики спектрального пропускания. Большинство этих воздействий можно разделить и записать уравнение
где A0/R2 - телесный угол, в котором осуществляется прием сигналов оптической системой (Ао — площадь линзы или зеркала объектива); T(λ,R) — коэффициент пропускания атмосферы для длины волны λ на пути R; ξ(λ)— коэффициент спектрального пропускания приемной оптической системы, который учитывает влияние селективных по спектру пропускания компонентов системы, например монохроматора; ξ (R, r) — основанная на геометрическом рассмотрении вероятность того, что излучение элемента площади поверхности объекта, положение которого определяется радиусом-вектором г и расстоянием до объекта R, достигнет детектора излучения. Допустим, что ξ (R,r) зависит только от перекрывания области, освещаемой лазерным лучом на поверхности объекта, полем зрения фотоприемника. Тогда будем считать ξ (R,r) коэффициентом перекрытия. На спектральную плотность энергетической яркости объекта J(λ,R,r) в значительной степени влияет характер взаимодействия лазерного излучения и среды объекта. В данном разделе будут рассмотрены упругое и неупругое рассеяние. В этом случае можно записать следующее уравнение:
Здесь I(R,r) — поверхностная плотность потока излучения на расстоянии R в области r, а
является объемным коэффициентом обратного рассеяния, где Ni(R, г)— концентрация центров рассеяния типа i; {dσ(λL)/dΩ}is — дифференциальное сечение рассеяния при экспонировании лазерным излучением с длиной волны λL; Li(λ)Δ λ — часть рассеянного излучения, попадающая в интервал длин волн (λ, λ+Δλ). Общую мощность сигнала, воспринимаемую детектором в момент t(=2R/c), соответствующий времени, необходимому для того, чтобы лазерный импульс прошел со скоростью света с путь R и обратное излучение достигло лидара, можно определить как
Интегрирование необходимо в связи с тем, что излучение, достигающее детектора в момент t, исходит не только с расстояния ct/2, но и из любой точки вдоль траектории лазерного импульса, где возникает рассеяние. Пределы интегрирования по длине волны совпадают со спектральным интервалом Δλ0 , центром которого является λ, фотоприемного устройства лидара. С учетом уравнений (2) и (3), можно записать следующее выражение:
Для рассеивающей среды ширина спектрального интервала наблюдаемого излучения такая же узкая, как и лазерного излучения. Если предположить, что ширина спектральных интервалов этих обоих излучений много меньше ширины спектрального интервала Δλ0 фотоприемного устройства, то Li(λ) и β можно рассматривать как дельта-функцию. Если также предположить, что в области перекрывания поля зрения фотоприемника и площади, освещаемой лазерным лучом, исследуемая среда будет однородной, то можно записать следующее уравнение:
Выше указывалось, что здесь вероятность ξ(R,r) следует считать равной единице в области, где поле зрения фотоприемного устройства совпадает с площадью, освещаемой лазерным лучом, и равной нулю для любой другой области. Будем полагать также, что поперечное распределение мощности в лазерном импульсе на расстоянии R на площади AL(R) является однородным. В этом случае
и Дополнительным упрощением является замена формы лазерного импульса, у которого интенсивность меняется от времени, на прямоугольную форму с продолжительностью τL. Тогда пределы интегрирования в уравнении (9) составят от c(t — τL )/2 до ct/2. Далее, так как интересующий нас путь луча в среде обычно значительно превышает длительность (длину) лазерного импульса cτL (иначе разрешение будет плохим), то для небольших промежутков расстояния, в которых ведется интегрирование, параметры, зависящие от расстояния, можно считать постоянными. Тогда полностью рассеянную мощность лазера, регистрируемую фотоприемником за время t = 2R/c, можно выразить как
Для прямоугольного лазерного импульса продолжительностью
где EL — выходная энергия лазерного импульса, a T(λL, R)— коэффициент пропускания атмосферы на длине волны лазера для пути R. Из закона Беера — Ламберта следует, что коэффициенты пропускания равны Здесь k(λL,R) и k(λ,R) являются коэффициентами ослабления в атмосфере для лазерной и детектируемой длин волн соответственно. Очевидно, что комбинация коэффициентов пропускания дает выражение для общего коэффициента пропускания атмосферы:
Хотя мгновенная мощность, падающая на детектор, является ценной характеристикой, еще большее значение имеет приращение радиационной энергии на длине волны λ, регистрируемое детектором в интервале времени (t,t+τd), где τd — период интегрирования детектора, а t= 2R/c:
Объединение уравнений (10) — (13) позволяет получить выражение для рассеиваемой энергии лазера, регистрируемой за время отклика детектора тd:
Его часто называют основным лидарным уравнением для рассеяния.
3.1. Детектирование молекулы CO2. На рис. 2 представлен спектр поглощения молекулы СО2. На диапазоне 1,5784 – 1,5791 нм наблюдается максимум поглощения, который подходит для нашего метода.
Рис. 2. Спектр поглощения молекулы СО2
Для детектировании молекул CO2 на данном диапазоне эффективнее всего будет использовать перестраиваемый лазер Lotis Tii-2214-PС ОРО и приемник Hamamatsu G8421-05, так как их технические характеристики оптимально подходят. LT-2214 - параметрический преобразователь (ОРО) излучения третьей гармоники лазеров на YAG:Nd (355 нм) с модулированной добротностью в плавно перестраиваемое излучение ближней ИК, УФ и видимой области спектра. Высокая эффективность генерации обеспечивается кристаллами ВВО, вырезанными для параметрического коллинеарного преобразования по I (LT-2214) и II типу (LT-2215) синхронизма соответственно. Приставки имеют встроенный комплект спектроделителей, позволяющий работать только с излучением сигнальной (signal) или холостой волн (idler). Для компенсации смещения выходного пучка при угловой перестройке длины волны ОРО преобразователи оснащены кварцевым компенсатором. Встроенное устройство подогрева обеспечивает защиту кристаллов ВВО от влаги и стабильность выходных параметров. Технические характеристики Lotis Tii-2214-РС ОРО:
Рис. 3. Кривая перестройки лазера.
Технические характеристики Hamamatsu G8421-05:
Расчет параметра CNR.
(15)
<is> среднее значение тока сигнала приемника где ŋ – эффективность приемной системы S – ватт-амперная чувствительность приемника Plo – мощность гетеродина Ps – принимаемый сигнал обратного рассеяния где Tinst – аппаратная константа ρ – коэффициент обратного рассеивания PS(0) – мощность лазера α – коэффициент поглощения атмосферы Rp – радиус приемной аппертутры D – длина дистанции <in> среднее значение тока шума приемника где NEP – мощность эквивалентного шума В – ширина полосы пропускания электронного тракта
На рис. 4 изображен график зависимости SNR от дистанции. Для дальнейших вычислений мы принимаем значение SNR=10, так как это пороговое условие. Rmax находим из рис. 4.
Рис. 4. График зависимости параметра CNR от дистанции.
Для оценки минимальной концентрации вещества, которое можно обнаружить с помощью лидара дифференциального поглощения, можно воспользоваться следующей приближенной формулой:
где Cm(λabs) – дифференциальное поглощение исследуемого газа ∆R – пространственное разрешение лидара (зависит от длительности импульса) [SNRmin] – минимальное значение сигнал/шум, которое достигается лидаром на расстоянии R.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 980. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (1)
(1)
 (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) справедливо соотношение
справедливо соотношение (11)
(11) и
и 
 (12)
(12) (13)
(13) (14)
(14)