|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Схема набора на аналоговой машине исследуемых звеньев, их статические и динамические характеристикиСтр 1 из 4Следующая ⇒ Исследование динамических характеристик и моделирование типовых линейных звеньев и линейных регуляторов Лабораторная работа № 1. Исследование динамических характеристик типовых линейных звеньев Назначение лабораторной работы 1.1.1 Ознакомление с динамическими характеристиками типовых звеньев автоматического регулирования (управления). 1.1.2 Ознакомление с основными типами линейных законов регулирования, используемых в системах автоматического управления технологических установок.
Теоретическое введение Система автоматического регулирования и отдельные ее элементы все время работают в переходных режимах, и поэтому необходимо знать их динамические свойства. Основными характеристиками элементов систем регулирования являются дифференциальные уравнения, которые во многих случаях можно линеаризовать и свести их к линейным дифференциальным уравнениям с постоянными коэффициентами. При этом оказывается, что, несмотря на большое разнообразие конструктивных форм отдельных элементов и выполняемых ими функций, многие из них описываются одинаковыми дифференциальными уравнениями. Поэтому можно провести унификацию отдельных элементов и представить их с помощью типовых звеньев систем автоматического регулирования. Типовым линейным звеном называют устройство, динамические свойства которого характеризуются дифференциальным уравнением не выше второго порядка. Более сложные звенья, описываемые дифференциальными уравнениями третьего порядка и выше, могут быть введены к комбинациям типовых звеньев. В качестве координаты, характеризующей состояние звена, обычно принимают выходную величину. Эта координата входит в уравнение звена в качестве зависимой переменной и в общем случае представляет собой функцию входной величины и времени. Дифференциальные уравнения звеньев в общем виде имеют вид: 
D(Р)Хвых= ±КN(Р)Хвх , (1.1)
где К - постоянная величина, называемая передаточным коэффициентом. D(Р)), К(Р)- функции оператора, как правило, полиномы. Степень полинома D(Р) выше степени полинома К(Р). Правая часть уравнения показывает, какие величины подаются на вход и с каким усилением эти величины передаются на выход звена. Левая часть уравнения дает закон, определяющий характер переходного процесса, т.е. показывает, как реагирует звено на входное воздействие. Передаточный коэффициент К характеризует статические свойства звена, он определяет наклон статической характеристики
К= Хвых / Хвх. при
Динамические свойства звеньев удобно представлять в виде передаточной функции W(P), определяемой как отношение изображения выходной величины к изображению входной:
При нулевых начальных условиях передаточная функция звена определяется отношением координаты звена к величине воздействия на звено:
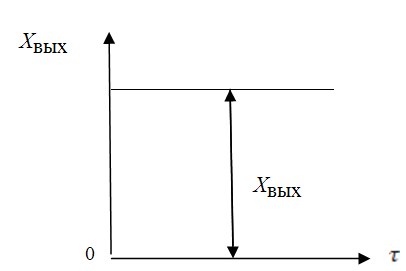
Передаточные функции широко используются при анализе и синтезе систем автоматического регулирования как средство упрощения методики исследования, рассматриваемых систем в переходных режимах. Данная работа преследует цель изучения динамических характеристик как отдельных типовых звеньев, имеющих большое распространение в системах автоматического регулирования энергетических агрегатов, так и идеальных регуляторов, которые могут быть представлены в виде цепочки, состоящей из нескольких типовых звеньев. Порядок выполнения работы Лабораторная работа для изучения динамических характеристик типовых звеньев и их соединений проводится на электронных аналоговых машинах МН-7 или МН-10. Лабораторная работа состоит из 8 упражнений, каждое из которых выполняется по общей методике следующим образом: 1) В соответствии со структурной схемой данного опыта на коммутационной панели аналоговой машины набирается требуемый элемент. 2) Установка коэффициента усиления К и постоянной времени интегрирования Т осуществляется потенциометром Rх с помощью вольтметра, подключенного к выходу соответствующего элемента. При этом на выход исходного элемента подается напряжение от делителя напряжения или же от источника постоянного напряжения. 3) С помощью делителя напряжения устанавливается величина входного сигнала. Для этого соединяют гнездо Uвых (Хвых) с гнездом U- вольтметра и поворотом ручки делителя напряжения устанавливают по вольтметру требуемое напряжение входного сигнала. Присоединив гнездо требуемой точки схемы, при нажатии кнопки "пуск" в исследуемую схему будет подано ступенчатое возмущение установленной величины. 4) Одно из выходных гнезд выбранной схемы соединяется с гнездом вольтметра. 5) Нажатием кнопки "пуск" на панели управления подается ступенчатый сигнал на вход исследуемой схемы. Через каждые 1-3 секунды сигнал останавливается нажатием кнопки "останов." и фиксируется выходной сигнал по вольтметру. 6) По окончании переходного процесса или по достижении выходным сигналом величины 95В для МН-7, 24В для МН-10 (по вольтметру) нажать кнопку "исходное положение". 7) При изменении параметров элемента или величины входного сигнала необходимо повторить (в соответствии с заданием на работу) в каждом случае определение кривых с пункта 2 или 3. Схема набора на аналоговой машине исследуемых звеньев, их статические и динамические характеристики 1.4.1 Пропорциональное звено. Звено называется пропорциональным, если входная и выходная его величины пропорциональны друг другу, т.е. если связь между ними может быть записана так: Хвых= КХвх . (1.5)
Разгонная характеристика пропорционального звена приведена на рисунке 1.1. Передаточная функция пропорционального звена является постоянной величиной и равна его передаточному коэффициенту:
W(P) = Хвых /Хвх = К. (1.6)
Условные обозначения пропорционального звена на структурных схемах приведены на рисунке 1.2.
Рисунок 1.1
Рисунок 1.2
Рисунок 1.3 Схема набора пропорционального звена приведена на рисунке 1.3. При наборе звена коэффициент К подбирается сопротивлением до тех пор, пока напряжение на выходе усилителя не будет в К раз отличаться от напряжения, поданного на вход в режиме ''подготовка". Исходные данные для снятия переходных характеристик пропорционального звена даны в таблице Т-1 приложения А.
1.4.2 Интегрирующее звено. Звено называется интегрирующим, если скорость изменения его выходной величины пропорциональна входной величине. Дифференциальное уравнение интегрирующего звена:
При ступенчатом возмущении разгонная характеристика интегрирующего звена приведена на рисунке 1.4.
Рисунок 1.4
Передаточная функция интегрирующего звена может быть представлена таким соотношением:
W(P) = Хвых /Хвх = К/Tp или W(P) = К/p. (1.8)
Условные обозначения интегрирующего звена на структурных схемах приведены на рисунке 1.5.
Рисунок 1.5
На рисунке 1.6 представлена схема набора интегрирующего звена.
Рисунок 1.6
Передаточный коэффициент К=1/T, где Т–постоянная интегрирования. Установка его осуществляется изменением сопротивления до тех пор, пока на выходе напряжение не будет в К раз отличаться от входного в режиме "подготовка". Исходные данные для снятия переходных характеристик даны в таблице Т-2 приложения А.
1.4.3 Апериодическое звено. Звено называется апериодическим или инерционным первого порядка, если его входная и выходная величины связаны между собой дифференциальным уравнением:
или (Тр +1) Хвых = КХвх . (1.10)
Переходная функция апериодического звена определяется выражением Хвых = КХвх (1–
Ей соответствует разгонная характеристика, изображенная на рисунке 1.7.
Здесь
Передаточная функция апериодического звена представляется соотношением: W(P) = Хвых /Хвх = К/(Tp+1). (1.13)
Рисунок 1.8
На рисунке 1.8 приведены обозначения апериодического звена в структурных системах, схема набора звена приведена на рисунке 1.9.
Рисунок 1.9
Установку коэффициента усиления К в данном случае удобно
Исходные данные для нахождения переходных характеристик
1.4.4 Реальное дифференцирующее звено. Звено носит название реального дифференцирующего, если его входная и выходная реального дифференцирующего величины связаны между собой дифференциальным уравнением:
или
(Тр+1) Хвых = КрХвх. (1.16)
Переходная функция реального дифференцирующего звена определяется: Хвых = КХвх
Переходная характеристика представлена на рисунке 1.10.
Здесь Т- постоянная времени дифференцирующего звена, определяемая на линии Xвых =0, отсекаемая касательной на графике переходной функции при τ=0. Более точно величину Т можно определить по выражению (см. рисунок 1.10):
Передаточная функция реального дифференцирующего звена представляется соотношением:
W(P) = Хвых /Хвх = Кр/(Tp+1). (1.19)
На рисунке 1.11 приведены условия изображения дифференцирующего звена в структурных схемах:
Рисунок 1.11
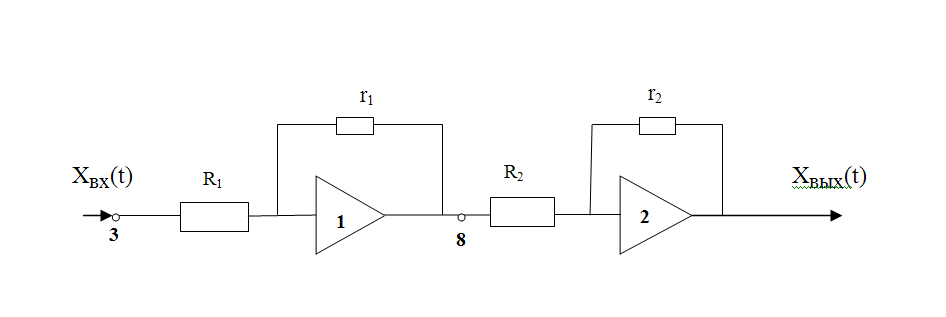
На рисунке 1.12 представлена схема набора реального дифференцирующего звена.
Рисунок 1.12
Установка усиления коэффициента К звена в данном случае осуществляется с помощью сопротивления R1, а постоянная времени дифференцирования Т с помощью сопротивлений R2 и R3, причем величина их определяется коэффициентом усиления КR2
1.4.5 Колебательное звено. Колебательным называют звено, в котором при ступенчатом изменении входной величины выходная величина стремится к новому установившемуся значению, совершая относительно его колебания, с амплитудой затухающей по закону экспоненты.
Дифференциальное уравнение звена:
или (T02 p2 + Тр+1) Хвых = К Хвх . (1.22)
Переходная функция звена имеет вид при Т < 2То:
Хвых = К[1–
Здесь α и ω - соответственно вещественная и мнимая составляющие корней характеристического уравнения, определяемые из соотношений (смотри рисунок 1.13):
К – коэффициент усиления (при Т и
Рисунок 1.13
Оценка колебательности переходной функции колебательного звена производится по величине степени затухания:
Передаточная функция колебательного звена:
W(P) =
На рисунке 1.14 приведены условные обозначения колебательного звена в структурных схемах. На рисунке 1.15 представлена схема набора колебательного звена.
Рисунок 1.14
Рисунок 1.15
Установка коэффициента усиления К осуществляется сопротивлением R5. Постоянная времени Т определяется сопротивлениями R1 и R2 , причем величина их определятся коэффициентом
Исходные данные для нахождения переходных характеристик даны в таблице Т-5 приложения А. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 376. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 . (1.2)
. (1.2) . (1.3)
. (1.3) . (1.4)
. (1.4)

 (1.7)
(1.7)


 (1.9)
(1.9) ). (1.11)
). (1.11) Рисунок 1.7
Рисунок 1.7 - коэффициент усиления звена; Т - постоянная времени звена, определяемая отрезком линии Хвых.уст, отсекаемой касательной, проведенной к наиболее крутому участку графика переходной функции. Более точно постоянная времени может быть определена по времени "полувыб." (см. рисунок 1.7)
- коэффициент усиления звена; Т - постоянная времени звена, определяемая отрезком линии Хвых.уст, отсекаемой касательной, проведенной к наиболее крутому участку графика переходной функции. Более точно постоянная времени может быть определена по времени "полувыб." (см. рисунок 1.7) . (1.12)
. (1.12)


 . (1.14)
. (1.14)
 . (1.15)
. (1.15) Рисунок 1.10
Рисунок 1.10



 КХвх (1.21)
КХвх (1.21) (
(  sin ωt + cos ωt)]Хвх. (1.23)
sin ωt + cos ωt)]Хвх. (1.23) ,
,  . (1.24)
. (1.24) К= Хвых ),
К= Хвых ), – постоянные времени, которые находят по следующим формулам:
– постоянные времени, которые находят по следующим формулам: ,
,  . (1.25)
. (1.25) Переходная характеристика колебательного звена приведена на рисунке 1.13:
Переходная характеристика колебательного звена приведена на рисунке 1.13: . (1.26)
. (1.26) . (1.27)
. (1.27)

 . (1.28)
. (1.28)