|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Отчет по лабораторной работеЛабораторная работа № 9. Построение корневых годографов для анализа и синтеза линейных систем управления.
Время выполнения работы: 4 часа
Цель работы:Целью лабораторной работы является ознакомление с методикой построения корневых годографов для анализа и синтеза линейных (линеаризованных) систем автоматического управления, а так же изучение критерия Ляпунова. Содержание
Общие указания к выполнению лабораторной работы Лабораторные работы выполняются на персональных компьютерах в операционной среде Windows с установленной системой MatLab 6.x и пакетом прикладных программ Control System Toolbox 5.1. Постановка задачи Дана модель разомкнутой системы, записанная в виде отношения произведений типовых звеньев:
Необходимо: 1. Построить корневой годограф. 2. Получить коэффициент усиления Kкр, при котором система находится на границе устойчивости. 3. Вычислить частоту кр, при которой в системе возникают незатухающие колебания. 4. Нанести на ветви корневого годографа значения полюсов замкнутой системы, соответствующие 0.5.Kкр и 0.25.Kкр. 5. Привести выражение для Wз(p) в виде произведения типовых звеньев. Указать значения параметров типовых звеньев. Литература 1. Ануфриев И.Е. Самоучитель Matlab 5.3/6.x. – СПб.: БХВ – Петербург, 2002. 2. Мартынов Н.Н. Введение в Matlab 6. – Москва: КУДИЦ, 2002. 3. Using the Control System Toolbox with Matlab 6: Computation. Visualization. Programming. - The MathWorks, Inc., 2001  4. Методы классической и современной теории автоматического управления: Учебник в 3-х т. /Под общ. ред. Н.Д. Егупова - М.: Изд-во МГТУ им. Н.Э.Баумана, 2000 Краткие сведения из теории В ряде случаев, имеющих практическое значение, модель линейной системы автоматического управления (САУ) задается в виде структурной схемы, состоящей из типовых звеньев, математическое описание которых задано в операторной форме. Связь между входом и выходом системы задается в виде передаточной функции W(s) [4]. B общем виде передаточную функцию W(s) можно представить в виде:
где p - комплексная переменная, B(p) - полином степени m; A(p) - полином степени n. Для физически реализуемых САУ m Применение метода корневого годографа (КГ) обусловлено фундаментальной зависимостью поведения линейной САУ от полюсов и нулей ее передаточной функции. Под полюсами подразумеваются корни полинома - знаменателя A(p), а под нулями - корни полинома числителя B(p). Полином A(p) называется также характеристическим многочленом передаточной функции W(p). Положение полюсов W(p) на комплексной плоскости определяет устойчивость САУ, а в совокупности с нулями вид импульсной переходной функции w(t) и переходной функции h(t). Метод корневого годографа позволяет находить полюса и нули передаточной функции замкнутой системы, располагая полюсами и нулями разомкнутой системы при изменении коэффициента усиления разомкнутой системы k. Передаточную функцию разомкнутой системы Wp(p) представим в виде:
где zi- нули передаточной функции Wp(p), ( Передаточная функция разомкнутой системы, как правило, задается в виде отношения произведений передаточных функций стандартных (типовых) звеньев, при описании которых используются выражения трех видов: Tp (3) T +1 (4) T 2p 2 + 2T p+ 1 (5) Здесь Т постоянная времени [с]. Если выражения (3), (4), (5) стоят в знаменателе передаточных функций звеньев (т.е. в числителе 1), то звенья называются соответственно интегрирующим, апериодическим, колебательным. Для колебательного звена ξ- безразмерный коэффициент затухания (0< ξ <1). Если выражения (3), (4), (5) стоят в числителе передаточных функций звеньев (т.е. в числителе 1), то звенья называются соответственно дифференцирующим, форсирующим первого порядка, форсирующим второго порядка. Коэффициент представления C вычисляется по формуле При замыкании системы с передаточной функцией Wp(p) единичной обратной связью передаточная функция замкнутой системы Wз(зs) принимает вид:
где знак "+" соответствует отрицательной обратной связи; знак "-" соответствует положительной обратной связи. Структурная схема системы с обратной связью приведена на рис. 1.
Рис.1. Структурная схема САУ Из (7) следует, что нули передаточной функции замкнутой системы равны нулям передаточной функции разомкнутой системы. Для определения полюсов замкнутой системы необходимо решить уравнение: Wp(p) = - 1 (8) Для систем небольшого порядка m, n < 5 7 построение КГ можно осуществлять "вручную" (с помощью транспортира и линейки).
Приведем свойства корневых годографов(случай отрицательной обратной связи): 1. Ветви корневого годографа непрерывны и расположены на комплексной плоскости симметрично относительно действительной оси. 2. Число ветвей КГ равно порядку системы n. Ветви начинаются в n полюсах разомкнутой системы при K = 0. При возрастании K от 0 до бесконечности полюса замкнутой системы двигаются по ветвям КГ. 3. Отрезки действительной оси, по которым перемещаются действительные полюса замкнутой системы являются действительными ветвями корневого годографа. Эти ветви находятся в тех частях действительной оси, справа от которых расположено нечетное общее число действительных полюсов и нулей разомкнутой системы. 4. m ветвей КГ при возрастании K от 0 до бесконечности заканчиваются в m нулях Wp(s), a (n - m) ветвей при K, стремящемся к бесконечности, удаляются от полюсов вдоль асимптот. 5. Асимптоты в виде звезды из (n - m) полупрямых выходят из точки с координатой
на действительной оси под углами
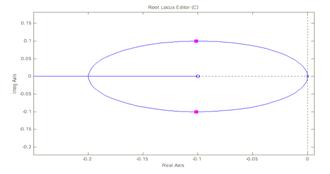
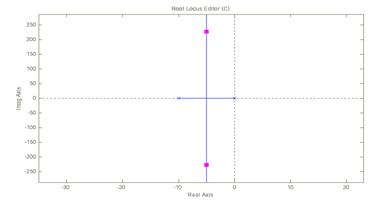
к действительной оси. 6. При расположении ветвей корневого годографа в левой полуплоскости s САУ устойчива. При пересечении ветвей КГ мнимой оси слева направо САУ становится неустойчивой. Пусть при K = Kкр пересечение КГ с мнимой осью произойдет в некоторой точке i кр. Назовем это значение коэффициента усиления критическим Kкр, а величину кр критической угловой частотой, на которой система становится неустойчивой. Метод КГ позволяет выбрать коэффициент усиления САУ, подобрать расположение полюсов и нулей передаточной функции корректирующих звеньев, определить параметры доминирующих полюсов САУ (ближайших к началу координат плоскости s). В качестве примеров, приведем КГ для двух систем автоматического управления. На рисунке 2а приведен корневой годограф САУ, передаточная функция разомкнутой системы, которой равна:
Рисунок 2б иллюстрирует КГ САУ с передаточной функцией разомкнутой системы вида:
а
б Рис.2. Примеры корневых годографов Критерий Ляпунова Оценка устойчивости системы производится по критерию Ляпунова. Критерий Ляпунова имеет следующую трактовку (является необходимым условием устойчивости): характеристическое уравнение системы с помощью теоремы Виета может быть записано в виде: D(p)=aopn + a1pn-1 + a2pn-2 + ... + an=ao(p-p1)(p-p2)...(p-pn)=0, где p1, p2, ..., pn - корни этого уравнения. Если система устойчива, значит все корни левые, то есть вещественные части всех корней отрицательны, что можно записать какai = -|ai| < 0.
Методика выполнения работы Задания выполняются по вариантам из курсовой работы Для выполнения лабораторной работы используется GUI-интерфейс "SISO-Design Tool" из пакета прикладных программ Control System Toolbox [2, 5] системы инженерных расчетов MatLab. Графический интерфейс предназначен для анализа и синтеза одномерных линейных (линеаризованных) систем автоматического управления (SISO - Single Input/Single Output). В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде набора полюсов, нулей и коэффициента усиления передаточной функции. Синтаксис команды, создающий LTI (Linear Time Invariant)-систему в виде объекта ZPK (zero-pole-gain) c одним входом и одним выходом:
z1,…, zm - значения нулей системы, q1,…, qn - значения полюсов системы, K - коэффициент усиления. Более естественным является вариант, при котором с помощью функции ZPK создается символьная переменная, например, 's', которая затем используется для определения передаточной функции в виде отношения (2). Например, после выполнения команд s = zpk('s'); W1 = (s+0.1)/(s^2) произойдет создание переменной W1 типа ZPK, определяющей передаточную функцию вида
Запуск графического интерфейса SISO-Design Tool осуществляется командой Sisotool или выбором соответствующего пункта в окне "Launch Pad".
Для выполнения лабораторной работы необходимо выбрать в меню View пункт Root Locus (корневой годограф), для отображения редактора Root Locus Editor. В правом верхнем углу SISO-Design Tool можно менять тип обратной связи (кнопка '+/-') и структурную схему САУ. В лабораторной работе предполагается наличие отрицательной обратной связи, и структурной схемы, показанной на рис.1. Для загрузки данных из рабочего пространства MatLab необходимо использовать меню "File/Import", в результате которой появляется диалог Import System Data. Необходимо, чтобы в результате импортирования данных получилась рассматриваемая схема САУ (рис. 1). Используя Root Locus Editor и значение коэффициента усиления (здесь: C - Current Compensator), следует выполнить задания лабораторной работы. Изменение динамических и частотных характеристик замкнутой системы при изменении К можно проследить используя меню "Tools/Loop Responses".
Таким образом, последовательность выполнения лабораторной работы следующая: · Ознакомиться с основными элементами теории метода корневого годографа. · В соответствии с заданным вариантом нарисовать структурную схему САУ. · Оценить устойчивость системы по критерию Ляпунова. · Представить распределение корней характеристического уравнения на комплексной плоскости. · Найти степень устойчивости САР (η). · Определить показатель колебательности САР (μ). · Дать приближенные оценки качества процесса регулирования по корням характеристического уравнения САР: · Запустить систему MatLab 6.1. · Создать zpk-объект, в соответствии с заданным вариантом. · Определить значения полюсов и нулей разомкнутой системы Wp(р). · Запустить SISO-Design Tool и построить КГ. · В соответствии с теорией проанализировать расположение ветвей корневого годографа. · Определить условия неустойчивости замкнутой САУ. Определить Kкр и ω кр. · Определить значения полюсов, соответствующие 0.5Kкр и 0.25Kкр. · Проанализировать влияние удаленных полюсов и нулей на величины Kкр и кр. · При K=1 привести выражение для Wз(р) в виде произведения типовых звеньев. Указать значения параметров типовых звеньев. · Оформить отчет. Методический пример Пусть необходимо исследовать САУ с передаточной функцией разомкнутой системы:
1. Оценим устойчивость системы по критерию Ляпунова. Для этого найдем корни характеристического полинома с помощью моделирующей программы MatLAB. 2. Представим распределение корней характеристического уравнения на комплексной плоскости. 3. Найдём степень устойчивости САР (η). Она равна минимальному значению модуля вещественной части всех корней. Показатель колебательности САР (μ) можно определить как отношение модуля мнимой части корней, образующих максимальный угол между лучами, проведёнными через них из начала координат, к вещественной: Теперь необходимо дать приближенные оценки качества процесса регулирования по корням характеристического уравнения САР: Время регулирования определяется по формуле: tрег = 3/ η . Перерегулирование находится по формуле:
4. Создадим ZPK-объект, найдем полюса и нули разомкнутой системы:
5. Запустим SISO-Design Tool, настроим параметры и импортируем ZPK-объект из рабочего пространства MatLab (рис.3). В окне Root Locus Editor интерфейса SISO-DesignTool построится корневой годограф (рис. 4).
Рис. 3. Диалог импортирования данных в SISO-Design Tool
Рис 4. SISO-Design Tool
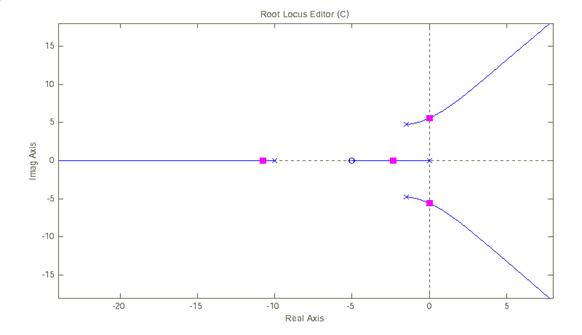
6. Двигая красным курсором по корневому годографу до пересечения ветвей с мнимой осью, определить значение Kкр (рис. 5). В данном случае Kкр = 3. Значение К кр соответствует мнимой координате пересечения КГ мнимой оси. Просмотреть это значение можно в нижней части интерфейса или выбрав меню "View/Closed-Loop Poles" (рис. 6).
Рис. 5. Корневой годограф с нанесенным значением Kкр
Рис.6. Closed-Loop Poles Viewer
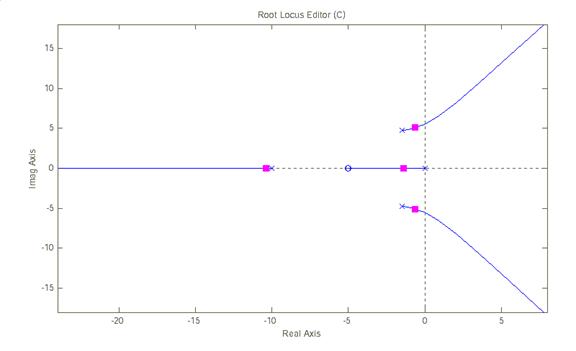
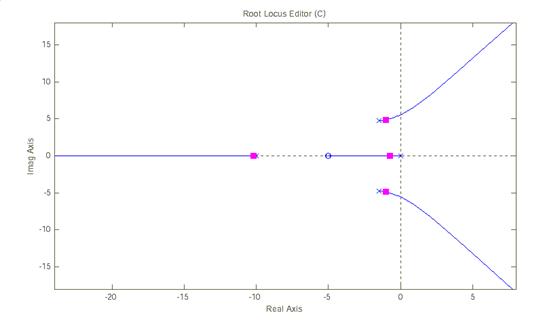
7. Вычислить ωкр можно, используя данные из таблицы Рауса. Таблицу Рауса нужно составить на основании коэффициентов характеристического уравнения передаточной функции замкнутой системы. Передаточную функция замкнутой системы получите, используя формулу (7). 8. Зададим значения 0.5Kкр и 0.25Kкр (рис. 7а , 7б) и определим значения полюсов (рис. 8а , 8б).
a. C= 0.5Kкр
б. C= 0.25Kкр
Рис.7. Корневой годограф САУ
a. C= 0.5Kкр
б. C= 0.25Kкр Рис. 8. Closed-Loop Poles Viewer
Отчет по лабораторной работе Отчет оформляется в соответствии с требованиями, предъявляемыми к оформлению лабораторных работ в вузе, и должен содержать: 1. Титульный лист 2. Наименование и цель работы. 3. Исходные данные варианта задания и структурная схема САУ. 4. Исследование системы по пунктам 1-4. 5. Чертежи комплексной плоскости и КГ. Нанести на все ветви значения Kкр, 0.5Kкр и 0.25Kкр. 6. Выражение для WЗ(р) в виде произведения типовых звеньев с указанными значениями параметров типовых звеньев. 7. Анализ результатов построения КГ. 8. Выводы. Замечание: Если САУ структурно-устойчива (при любом К >0), то ограничиться построением КГ, удаленного от начала координат на удвоенный модуль наиболее удалённого от начала координат полюса разомкнутой системы.
Контрольные вопросы 1. Дать определение передаточной функции, полюсов, нулей, корневого годографа. Назвать типовые звенья САУ. Что такое отрицательная обратная связь? 2. Показать влияние расположения нуля на поведение ветвей КГ (для примера указанного преподавателем). 3. Показать на конкретном примере, что по мере удаления ветви КГ от начала координат движение ветви в зависимости от K замедляется. 4. Сформулировать оценку устойчивости системы по критерию Ляпунова. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 509. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 (1)
(1) n. Коэффициенты указанных полиномов - действительные числа.
n. Коэффициенты указанных полиномов - действительные числа. (2)
(2) , а qi- полюса передаточной функции Wp(p), (
, а qi- полюса передаточной функции Wp(p), (  ), n и m - порядки знаменателя и числителя; K - коэффициент усиления разомкнутой системы; C - коэффициент представления.
), n и m - порядки знаменателя и числителя; K - коэффициент усиления разомкнутой системы; C - коэффициент представления. (6)
(6) (7)
(7)

 .
. .
.

 .
. .
.