|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Порядок и методика проведения работы.Цель работы В результате проведения настоящей лабораторной работы студенты должны уяснить принцип двухпозиционного регулирования, а также методику расчета показателей качества процесса двухпозиционного регулирования по динамическим свойствам объекта.
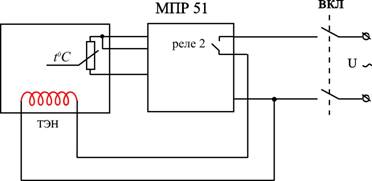
Общие сведения Вырабатываемые различными типами регуляторов при рассогласовании текущего и заданного значений параметра сигналы позволяют осуществлять различные виды регулирования. В одних системах регулирующий орган перемещается в любое положение в пределах его полного хода и регулирует пропускаемые количества вещества плавно. В других - наиболее простых - регулятор работает так, что регулирующий орган может занимать некоторые фиксированные положения. Например, регулирующая заслонка либо полностью открывается, либо, наоборот, полностью закрывается, т.е. имеет 2 фиксированные позиции. В некоторых случаях целесообразно, с точки зрения ведения процесса, устанавливать регулирующий орган также в промежуточное положение. Например, заслонка, кроме 2-х указанных положений, должна еще иметь возможность открываться наполовину. Число фиксированных позиций в таких случаях больше двух. Регуляторы, работающие подобным образом, называют в общем случае позиционными, а по количеству позиций их подразделяют на: а) двухпозиционные (или регуляторы "открыт-закрыт"), б) трехпозиционные, в) многопозиционные, Двухпозиционные системы регулирования широко используются в практике автоматического регулирования производственных процессов пищевой промышленности: для регулирования температуры, уровня, давления и других технологических параметров. Двухпозиционные автоматические системы регулирования, по сравнению с другими системами регулирования, несложны по конструкции, дешевы, надежны в работе, просто настраиваются и обслуживаются.  Двухпозиционные регуляторы часто встраиваются в базисные приборы: потенциометры, мосты, милливольтметры. В данной лабораторной установке двухпозиционный регулятор встроен в автоматический электронный мост. В автоматической системе регулирования АСР основными элементами являются регулируемый объект и автоматический регулятор. Регулируемый объект, который в большинстве случаев является неизменяемой частью, в основном определяют характер всей АСР. Для правильного выбора регулятора необходимо знать динамику регулируемого объекта, т.е. поведение его при переходе из одного равновесного состояния в другое. Динамические свойства объекта изучены в лабораторной работе 5. Рассмотрим в качестве примера электрическую схему двухпозиционного регулирования температуры нагревательного элемента (ТЭН), установленного в лаборатории кафедры (рис 1). Передняя панель лабораторного стенда изображена на рис 2, а график процесса двухпозиционного регулирования представлен на рис 3. Измерительное устройство АСР - термопреобразователь сопротивления ТС, вторичный показывающий прибор программный задатчик-регулятор. Заданное значение и величину зоны нечувствительности можно изменить при помощи регулировок прибора МПР-51.
Рис.1 Электрическая схема стенда.
Рис.2 Передняя панель стенда.
При включении установки, если температура ТЭН ниже заданного значения, контакты реле замкнуты (при этом загорается контрольная лампочка), на ТЭН подается напряжение. При повышении температуры она достигает верхней границы зоны нечувствительности и реле размыкает цепь ТЭН (лампочка гаснет). Температура начинает падать. Нагреватель не включен до тех пор, пока температура не упадет ниже нижней границы зоны нечувствительности. После чего контакты реле снова замыкаются на ТЭН подается напряжение и цикл работы системы регулирования повторяется. Таким образом, процесс регулирования при использовании двухпозиционного регулятора представляет собой колебания регулируемой величины вокруг заданного значения (так называемые автоколебания). Качество такого процесса оценивается амплитудой ya и периодом T. Их значение зависит от динамических свойств объекта регулирования, зоны нечувствительности регулятора, величины регулирующего воздействия. Некоторые тепловые объекты регулирования, в том числе ТЭН, используемый в нашей лабораторной установке, имеют различные динамические свойства при нагреве и охлаждении. Переходные характеристики (кривые разгона) для нагрева и охлаждения теплового объекта получены в лабораторной работе 2. Они отличаются значениями постоянных времени и могут быть аппроксимированы решениями дифференциальных уравнений 1-го порядка:
Tнy’+ y = y¥ - yo Toy’+ y = yo’ - y¥ (1)
В лабораторной установке в качестве регулятора с регулируемой зоной нечувствительности используется МПР-51. Его статическая характеристика приведена на рис.4. В зоне нечувствительности состояние регулятора определяется не только значением входного воздействия, но и направлением изменения этого воздействия: при увеличении входного сигнала до Y=а, выходной сигнал скачкообразно принимает значение -Х1 (реле разомкнуто), а при уменьшении входного сигнала до Y=-а выходной скачкообразно принимает значение +Х1 (реле замкнуто).
Рис. 3. Кривая переходного процесса двухпозиционного регулирования.
Рис. 4. Статическая характеристика регулятора.
Диапазон установившихся колебаний выходной величины ОР без запаздывания равен зоне неоднозначности двухпозиционного регулятора. Период установившихся колебаний Т зависит от амплитуды регулирующего воздействия. Уменьшение регулирующего воздействия приводит к возрастанию Т. Для объектов регулирования с запаздыванием амплитуда автоколебаний и длительность периода увеличиваются.
Порядок и методика проведения работы.
Рис. 5. Приложение mpr51 reporter Изучить особенности систем релейного регулирования. Экспериментальные исследования на стенде проводятся в следующей последовательности: 1. Включить стенд, выключатель установить в положение Тпрод. Убедиться, что на панели МПР отображается температура Тпрод, в ином случае кнопкой 2. Включить компьютер. Запустить приложение mpr51 reporter рис 5. (ярлык находится на рабочем столе). В открывшемся окне галочками отметить регистрируемые параметры (время, Тпрод) по 1 каналу. Для стендов №№6,7 выставить скорость обмена СОМ – порта 2400. Период опроса задать равным 3сек или другое по заданию преподавателя. 3. Установить задатчиком регулятора МПР51 заданные значения температуры и зоны нечувствительности (по указанию преподавателя). Для этого в режиме ПРОГРММИРОВАНИЯ зайти на уровень L2 выбираем параметр P.07 и устанавливаем значение 002 (это означает что 1-ый регулятор управляет ИУ типа нагреватель). Переходим к параметру P.08 (здесь устанавливаем зону нечувствительности). Способом описанным выше вносим изменения в программу прибора. Переходим на уровень L1. Выбираем параметр Е.02 (задается значение уставки). Запись изменений в память прибора осуществляется способом описанным выше. Выходим из режима программирования и запускаем программу двухпозиционного регулирования, включаем пуск программы mpr51 reporter. 4. В случае регистрации данных с помощью mpr51 reporter все данные записываются в файл находящийся в папке mpr51 reporter (ярлык находится на рабочем столе). Каждый из файлов записывается в течение суток, и имеет имя, соответствующее дате записи. Например, файл данных прибора МПР51, подключенного к 1-му каналу адаптера АС2, и созданный 6 октября 2009 г. (6/10/09), будет иметь имя 06_10_09.rp1. Получив несколько колебаний остановить процесс регистрации данных. По заданию преподавателя поменять зону нечувствительности и продолжить регистрацию данных. 5.Ручная настройка ПИД - регулятора. Для подбора коэффициентов необходимо задать значения программируемых параметров P.01 = 000, P.02 = 000, P.03 = 000 (см. прил. МПР51), выставить уставку входного параметра и запустить программу. Прибор будет поддерживать входную величину (например, температуру) возле уставки с большими колебаниями. 5.1. Постепенно увеличивая значения параметра P.03 (т.е. осуществляя П - закон регулирования) надо добиться минимальных колебаний. Если таким образом удается достичь приемлемого регулирования, то настройку регулятора можно считать оконченной. 5.2. Если при минимальных колебаниях входная величина не дотягивает до уставки, либо не удается избавиться от колебаний входной величины, то следует ввести интегральную составляющую (реализуя таким образом ПИ - закон регулирования). Для этого надо установить большое значение параметра P.02, например, 500 или 800. Постепенно уменьшая значение P.02, необходимо добиться минимального недотягивания входной величины до уставки при максимальном значении P.02. Если удается получить удовлетворительные результаты регулирования, то настройку регулятора можно считать оконченной. 5.3. Если после введения интегральной составляющей в выходной сигнал реакция регулятора сильно замедлилась, то нужно ввести дифференциальную составляющую (реализуя ПИД - закон регулирования). Для этого надо постепенно увеличивать значение параметра P.01. Если в результате регулирование удовлетворительное, то регулятор считается настроенным. 5.4. Если не удается достичь удовлетворительных результатов, то следует повторить настройку регулятора путем изменения значений параметров P.02 и P.03, как описывалось выше, (см. пп. 5.1, 5.2). 6. Построить по экспериментальным точкам график в координатах: температура по оси ординат, время по оси абсцисс. Либо открыть файл регистрации и построить график в Exell. По полученному графику процесса регулирования определить его показатели качества: амплитуду Уa и период колебаний Ta .для каждого из опытов.
Контрольные вопросы. 1. Что такое автоматическая система регулирования (АСР)? 2. Из каких элементов состоит автоматическая система регулирования, их назначение? 3. Какие виды регулирования Вы знаете? 4. Принцип работы позиционного регулятора? 5. Какими показателями оценивается качество двухпозиционного регулирования? 6. Что такое зона нечувствительности? 7. Как влияет величина зоны нечувствительности регулятора на процесс двухпозиционного регулирования? 8. Как влияет увеличение емкости объекта на процесс двухпозиционного регулирования? 9. Как влияет величина запаздывания объекта на качество регулирования. 10. Как можно улучшить качество регулирования двухпозиционной системы? 11.Какими достоинствами обладает двухпозиционный регулятор?
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 307. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |




 выбрать индикацию Тпрод и записать это значение.
выбрать индикацию Тпрод и записать это значение.