|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Керування режимами роботи ВУ з допомогоюконтролера ТРМ10а Зовнішній вигляд регулятора:
Рисунок 16 – Зовнішній вигляд ТРМ10
Позначення ТРМ-10а:
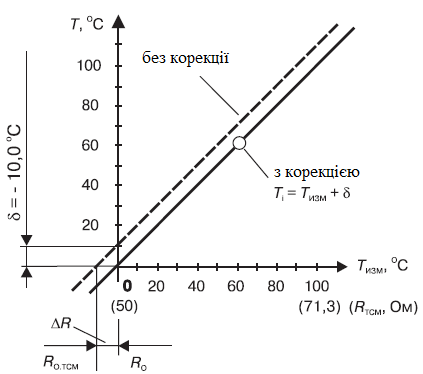
Рисунок 17 – Функціональне позначення регулятора Діапазон напруги живлення: А – живлення приладу 187...242 В змінного струму частотою 50±5 Гц; Б – живлення приладу 90...245 В змінного струму з частотою 47...63 Гц або постійного струму. Конструктивне виконання: Н – корпус настінного кріплення з розмірами 130x105x65мм і мірою захисту корпусу IP44; Щ1 – корпус щитового кріплення з розмірами 96x96x70мм і мірою захисту з боку передньої панелі IP54; Щ2 – корпус щитового кріплення з розмірами 96x48x100мм і мірою захисту з боку передньої панелі IP54; Д – корпус для кріплення на DIN –рейку з розмірами88x72x54 мм і мірою захисту з боку лицьової панелі IP20. Тип вхідного пристрою: ТС – для приладів, працюючих з термоперетворювачами опору по НСХ : 50М, 100М, 50П, 100П і гр. 23; ТП1 – для приладів, працюючих з термопарами по НСХ :XK(L) - хромель-копель, ХА(К) - хромель-алюмель; ТП2 – для приладів, працюючих з термопарами по НСХ :НН(М) - нікросил-нісил і XK(J) - залізо-константан; ТВП – для приладів, працюючих з термопарами по НСХ :ПП(5) - платина-платина-родій і ПП(R) - платина-платина-родій; AT – для приладів, працюючих з уніфікованими сигналами постійного струму : 0...5 мА, 0...20 мА і 4...20 мА; АН – для приладів, працюючих з уніфікованими сигналами напруги постійного струму 0...1 В. Тип вбудованого вихідного облаштування (ВП) ПІД-регулятора : Р – реле електромагнітне; К – транзисторна оптопара структури n-р-n-типа; С – симісторна оптопара; І - цифро-аналоговий перетворювач "параметр - струм4...20 мА";  СЗ- три симісторних оптопари для управління трифазним навантаженням. Обробка вхідного сигналу Сигнал, отриманий з датчика, перетворюється в цифрове значення вимірюваної величини (температури, тиску, витрати і т. д). При роботі з датчиками, що формують на виході уніфікований сигнал струму або напруги (модифікації AT і АН), можна довільно задавати шкалу виміру. Для цього встановлюються наступні параметри роботи приладу : "нижня" і "верхня межа шкали виміру" і "положення десяткової точки". Параметр "нижня межа шкали виміру" визначає, яке значення вимірюваної величини виводитиметься на індикатор при мінімальному рівні сигналу з датчика (наприклад, 4 мА для датчика з вихідним сигналом струму4...20 мА). Параметр "верхня межа шкали виміру" визначає, яке значення вимірюваної величини виводитиметься на індикатор при максимальному рівні сигналу з датчика(наприклад, 20 мА для датчика з вихідним сигналом струму 4...20 мА або 1 В для датчика з вихідним сигналом напруги 0...1 В). Параметр "положення десяткової точки" визначає кількість знаків після коми, яке виводитиметься на індикатор. Корекція вимірів : Перетворені значення можуть бути відкориговані з метою усунення початкової погрішності перетворення вхідних датчиків. Ці погрішності виявляються після проведення метрологічних випробувань і усуваються шляхом введення корегуючого значення δ, встановлюваного в параметрі "зрушення характеристики". До кожного обчисленого значення виміряної величини Твим додається значення цього параметра, і тоді на індикатор виводиться значення Ті. Корекція "зрушення характеристики" використовується для компенсації погрішностей, що вносяться опором дротів (при підключенні термоперетворювачів опору за двопровідною схемою), що підводять, а також при відхиленні у термоперетворювача опору значення RO від стандартного.
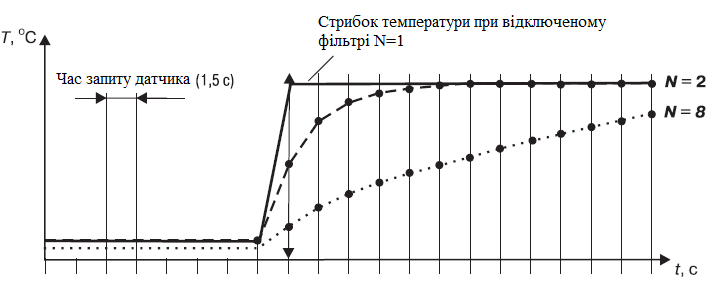
Рисунок 18 – Приклад наведення корекції Цифрова фільтрація вимірів Для поліпшення експлуатаційних якостей приладу у блок обробки даних введений цифровий фільтр, що дозволяє зменшити вплив випадкових перешкод на вимір контрольованих величин. Робота фільтру описується параметром "глибина цифрового фільтру" N, що визначає кількість останніх N-вимірів, для яких прилад обчислює середнє арифметичне. Отримана величина поступає на входи ПІД-регулятора і пристрій порівняння. Вид перехідних характеристик для різних N показаний на рисунку 19. При значенні параметра рівному 0 або 1,фільтр вимкнений. Зменшення значення N призводить до швидшої реакції приладу на стрибкоподібні зміни контрольованої величини, але знижує завадо захищеність вимірювального тракту. Збільшення значення N призводить до поліпшення завадозахищеності, але разом з цим підвищує інерційність приладу.
Рисунок 19 – Вид перехідних характеристик для N-вимірів ПІД-регулятор пристрою Основні параметри роботи ПІД-регулятора На виході регулятора виробляється керуючий сигнал (вихід на потужність), дія якого спрямована на зменшення відхилення поточного значення контрольованої величини від заданого : (Еі)
Де: Хр - смуга пропорціональності; Еі - різниця між заданим Туст і поточним Т значенням вимірюваної величини, або розузгодження; τд - постійна часу диференціювання; ΔЕs - різниця між двома сусідніми розузгодженнями Еi і Еi - 1; Δtвим = 1,5с - час між двома сусідніми вимірами Тi і Тi-1; τі - постійна часу інтегрування; ΣЕі - накопичена сума розузгоджень. З формули (1) видно, що при ПІД-регулюванні сигнал управління залежить від: 1 ) Е - різниці між поточним значенням вимірюваної величини Ті і заданим значенням параметра Туст. Відношення Еі/Хр - називається пропорційною складовою вихідного сигналу; 2) накопичених помилок регулювання ΣЕі Δtвим, яка є додатковим джерелом вихідної потужності і дозволяє добитися максимальної швидкості досягнення температури уставки за відсутності перерегулювання; вираз 3) швидкості зміни параметра ΔЕі/Δtвим, що викликає реакцію регулятора на різку зміну вимірюваного параметра, що виникла, наприклад,в результаті зовнішньої збурюючої дії; Для ефективної роботи ПІД-регулятора необхідно встановити правильні для конкретного об'єкту регулювання значення коефіцієнтів ПІД-регулятора Хр, τд і τі. Для аналогового управління вихідний сигнал ПІД-регулятора перетвориться в пропорційний йому струм 4. .20 мА. Для імпульсного управління вихідний сигнал перетвориться в послідовність імпульсів, що управляють,з періодом дотримання Тсл і тривалістю кожного імпульсу D, яка визначається по формулі:
Тип зовнішнього виконавчого пристрою (тип управління)необхідно вказати в програмованому параметрі "Тип вихідного сигналу". При використанні електромагнітного реле цей параметр задають рівним 0, а при використанні безконтактних ключів (тиристорів, твердотілих реле і тому подібне) -рівним 1. Мінімальні значення тривалості імпульсів управління, що формуються при цьому приладом ТРМ10приведені в таблиці 1. Таблиця 1 - Значення тривалості імпульсів управління
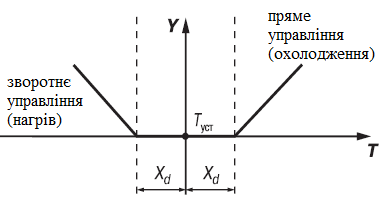
При використанні аналогового виходу цей параметр встановлюють рівним 2. Значення параметра "Період дотримання імпульсу" (Тсл)впливає на частоту вихідного сигналу ПІД-регулятора. Для ефективнішої роботи ПІД-регулятор повинен мати миттєву реакцію на зміни регульованої величини, тому частота вихідного сигналу має бути приблизно рівній частоті опитування вхідного датчика. Тому слід встановлювати значення Тсл, рівним 1...2с, що можливо тільки при використанні безконтактних ключів(тиристорів, симісторів). Збільшення періоду дотримання керуючих імпульсів дозволяє при використанні як виконавчий пристрій електромагнітного реле або пускача подовжити термін служби силових контактів, але може погіршити якість регулювання. Додаткові параметри ПІД-регулятора Для правильного формування вихідного сигналу ПІД-регулятора необхідно задати "тип виконавчого пристрою": нагрівач або холодильник. Нагрівачем умовно називають пристрій, при включенні якого збільшується значення вимірюваного параметра. Холодильником називають пристрій, при включенні якого зменшується значення вимірюваного параметра. Для виключення зайвих спрацьовувань регулятора при невеликому значенні розузгодження Еі для обчислення значень У по формулі (1) використовується уточнене значення Ер, обчислене відповідно до умов : якщо |Ei|<Xd, то ЕР=0; якщо Ei>Xd, то ЕР=Ei-Xd; якщо Ei< - Xd, то ЕР= Ei+Xd; де Xd - зона чутливості (рис. 20).
Рисунок 20 – Зона нечутливості Значення зони нечутливості задається в параметрі "зона нечутливості". |
|||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 867. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||


 (1)
(1)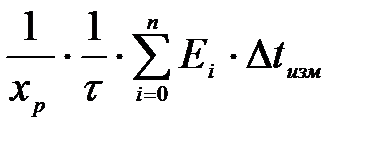 називається інтегральною складовою вихідного сигналу;
називається інтегральною складовою вихідного сигналу; вираз називається диференціальною складовою вихідного сигналу.
вираз називається диференціальною складовою вихідного сигналу. .
.