|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Расчет по Волновому алгоритму ЛиСтр 1 из 2Следующая ⇒
На Рис.8.1 дана площадка с 2 контактами и препятствиями. Выполнить трассировку в 4 и 8 направлениях.
Рис. 8.1
На Рис. 8.2 из источника А моделируется распространение числовой волны до тех пор, пока ее фронт не достиг цели В. Между ячейками A и B существует путь длиной 9.
Рис. 8.2
На Рис. 8.3 мы видим, что трассы прокладываются только под углами в 90о. 
Рис. 8.3
На Рис.8.1 дана площадка с 2 контактами и препятствиями. Выполнить трассировку в 4 направлениях.
На Рис. 8.4 из источника А моделируется распространение числовой волны до тех пор, пока ее фронт не достиг цели В. Между ячейками A и B существует путь длиной 6.
Рис. 8.4
На Рис. 8.5 мы видим, что трассы могут проводиться под любыми углами.
Рис. 8.5
Машинный расчет по Волновому алгоритму Ли
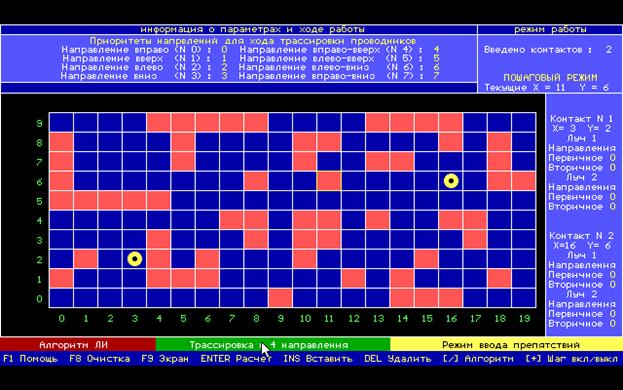
На Рис.8.6 дана площадка с 2 контактами и препятствиями. Выполнить трассировку в 4 и 8 направлениях.
Рис. 8.6
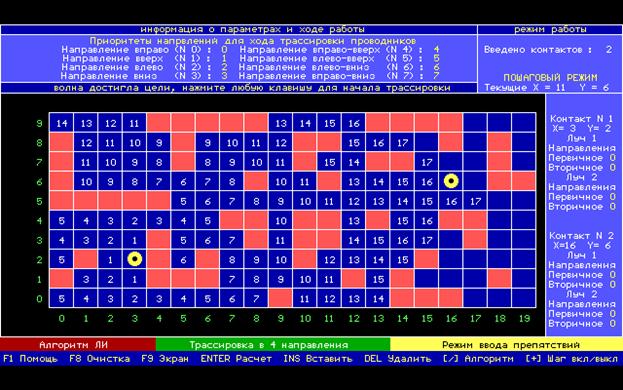
На Рис.8.7 (а,б) машинный расчет по Волновому алгоритму Ли, трассировка в 4 направлениях.
Рис. 8.7, а
Рис. 8.7, б
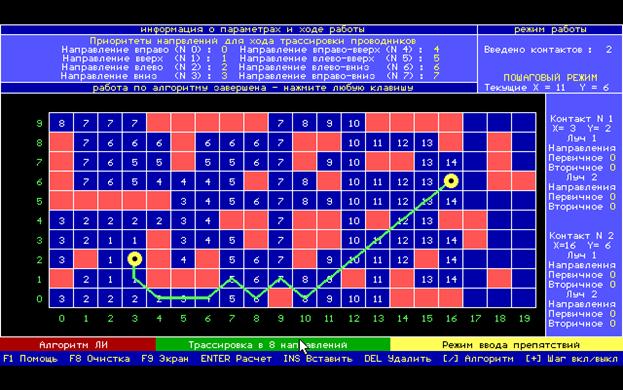
На Рис.8.8 (а,б) машинный расчет по Волновому алгоритму Ли, трассировка в 8 направлениях.
Рис. 8.8, а
Рис. 8.8, б
Расчет по Алгоритму Акерса На Рис.8.1 дана площадка с 2 контактами и препятствиями. Выполнить трассировку в 4 направлениях. Для построения пути в общем случае необходимо найти требуемую подпо-следовательность отметок базовой последовательности. Это легко может быть сделано по отметке ячейки-цели и отметке соседней с ней ячейки. В нашем случае цель достигнута первой 1, поэтому надо искать ячейку с отметкой 2. Их две: внизу и слева. Воспользуемся приоритетом. Вначале просматриваем ячейку снизу от цели. Поскольку ее вес равен 2, путь строим в нее. В ней вновь анализируем соседние ячейки в порядке приоритета. Ищем ячейку с весом 2. Это опять нижняя ячейка. Далее надо аналогично искать ячейку с весом 1. (см. Рис. 8.9)
Рис. 8.9
Вариант соединения контактов A и B при этом заданном приоритете дан на рис.8.10.
Рис.8.10
Машинный расчет по Алгоритму Акерса На Рис.8.6 дана площадка с 2 контактами и препятствиями. Выполнить трассировку в 4 направлениях. На Рис.8.11 (а,б) машинный расчет по алгоритму Акерса, трассировка в 4 направлениях.
Рис. 8.11, а
Рис. 8.11, б Расчет по Лучевому алгоритму
На Рис.8.12 дана площадка с 2 контактами и препятствиями. Контакт № 1: Луч 1: направление первичное 3, вторичное 2. Луч 2: направление первичное 2, вторичное 3. Контакт № 2: Луч 1: направление первичное 1, вторичное 0. Луч 2: направление первичное 0, вторичное 1. Выполнить трассировку в 4 направлениях. Распространение лучей происходит одновременно из обоих источников до встречи двух разноименных лучей в некоторой точке C. Путь проводится из ячейки C, в которой встретились лучи по путевым координатам, и проходит через ячейки, по которым распространялись лучи. При распространении луча может возникнуть ситуация, когда две соседние ячейки будут заняты. В этом случае луч считается заблокированным и его распространение прекращается. Рассмотрим работу лучевого алгоритма на примере (рис.8.13).
Рис. 8.12
Рис. 8.13 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 374. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 А
0
А
0