|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Построение пути минимальной длиныПусть задано множество ячеек дискретного поля, на котором построено некоторое число проводников. Требуется построить новый проводник между точками A и B так, чтобы он не пересекал ранее построенные проводники и имел минимально возможную длину (рис.7.8).
Рис.7.8. Рис.7.9.
Распространение волны начинаем из источника – точки A, вес которой положим равным нулю. Строим расширяющийся фронт волны влияний, распространяющийся на все соседние свободные с этой точкой ячейки. Каждая ячейка фронта генерирует следующий фронт волны, который занимает все соседние свободные с первым фронтом ячейки и т. д. Вес ячейки k-го фронта считается равным весу соседней ячейки (k – 1)-го фронта плюс единица, т. е. Проведение пути начинаем с ячейки B (цели). Просматриваем окрестность точки цели (приемника) и находим ячейку, которая в наиболее приоритетном направлении имеет вес на единицу меньше. Перемещаемся в эту ячейку и отмечаем след перехода. Процесс продолжаем до тех пор, пока след не приведет в точку A. На рис.7.9 показан вновь проведенный путь. Из него видно, что построенный проводник действительно является кратчайшим между точками A и B, причем его относительная длина равна весу, присвоенного ячейке B.  В данном случае путевая координата несет избыточную информацию. Действительно, при проведении пути использовались только данные о весе просматриваемой ячейки, а приоритет его проведения учитывался последова-тельностью просмотра этих ячеек. Достоинства волнового алгоритма: возможность нахождения пути мини-мальной длины в любом лабиринте, если существует хотя бы один путь в нем. Недостатками волнового алгоритма Ли являются малое быстродействие и большой объем оперативной памяти ЭВМ, необходимый для хранения инфор-мации о текущем состоянии всех ячеек коммутационного поля.
Алгоритм Акерса Наиболее экономичный способ кодирования состояний ячеек коммутаци-онного поля предложен Акерсом [1 – 4]. При распространении волны ячейки поля получают отметки в соответствии с базовой последовательностью 1, 1, 2, 2, 1, 1, 2, 2, … . Данная последовательность характерна тем, что в ней любой член имеет разных соседей слева и справа. Вначале все незанятые ячейки, соседние с ячейкой-источником, помечаются 1, затем все ячейки фронта Для построения пути в общем случае необходимо найти требуемую под-по-следовательность отметок базовой последовательности. Это легко может быть сделано по отметке ячейки-цели и отметке соседней с ней ячейки. В нашем случае цель достигнута первой 1, поэтому надо искать ячейку с отметкой 2. Их две: внизу и слева. Воспользуемся приоритетом. Вначале просматриваем ячейку снизу от цели. Поскольку ее вес равен 2, путь строим в нее. В ней вновь анализируем соседние ячейки в порядке приоритета. Ищем ячейку с весом 2. Это опять нижняя ячейка. Далее надо аналогично искать ячейку с весом 1. Вариант соединения контактов A и B при этом заданном приоритете дан на рис.7.10. В методе Акерса ячейка поля может находиться в следующих состояниях: пустая, занятая, иметь отметку 1 или 2. Таким образом, на каждую ячейку поля достаточно всего два двоичных разряда памяти.
Лучевой алгоритм Основная идея алгоритма, предложенного Л. Б. Абрайтисом [1 – 4], заклю-чается в исследовании поля для определения пути между ячейками A и B по некоторым заранее заданным направлениям, подобным лучам. Это позволяет сократить число просматриваемых алгоритмом ячеек, а, следовательно, и время на анализ и кодировку их состояний, однако снижает вероятность нахождения пути сложной конфигурации и усложняет учет конструктивных требований к технологии печатной платы.
Рис.7.10.
Работа алгоритма заключается в следующем. Задается число лучей, распро-страняемых из ячейки A и B, а также порядок присвоения путевых координат. Обычно число лучей для каждой из ячеек (источников) принимают одинаковым (часто равным двум). Лучи Путь проводится из ячейки C, в которой встретились лучи по путевым координатам, и проходит через ячейки, по которым распространялись лучи. При распространении луча может возникнуть ситуация, когда две соседние ячейки будут заняты. В этом случае луч считается заблокированным и его рас-пространение прекращается. Рассмотрим работу лучевого алгоритма на примере (рис.7.11). Для источников A и B взято по два луча с взаимно противоположными направлениями. Поскольку разности координат На первом шаге алгоритма просматриваются ячейки с координатами (3,8), (9,3), (4,9) и (8,2). Поскольку эти ячейки оказались свободными, в них ставятся путевые координаты, которые указывают назад, т.е. на те ячейки, из которых на
Рис.7.11.
этом шаге поступил луч. На третьем шаге луч Путь строится из ячейки C по путевым координатам в направлении ячеек A и B. Если бы ячейка (7,2) была занята, то лучи Достоинства алгоритма: получение соединений минимальной длины и высокое быстродействие. Недостаток: не всегда находит решение, хотя оно может существовать, при трассировке двухслойных плат с ортогональной коммутацией с помощью лучевого алгоритма удается построить до 70% трасс, а остальные проводят, используя волновой алгоритм или вручную. Поэтому лучевой алгоритм целесообразно применять для трассировки плат с небольшой степенью заполнения ячеек или в начальной стадии трассировки совместно с волновым алгоритмом. В этом случае удается значительно экономить время.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 371. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


 . Процесс распространения волны продолжаем до тех пор, пока не достигнем ячейки с точкой B (целью). Процесс поиска пути из A в B в соответствии с рассмотренным алгоритмом для данного варианта трассировки показан на рис.7.8. В каждой ячейке указаны приписанные ей на этапе распространения волны путевые координаты и веса. Ячейка B достигается при построении 16-го фронта волны.
. Процесс распространения волны продолжаем до тех пор, пока не достигнем ячейки с точкой B (целью). Процесс поиска пути из A в B в соответствии с рассмотренным алгоритмом для данного варианта трассировки показан на рис.7.8. В каждой ячейке указаны приписанные ей на этапе распространения волны путевые координаты и веса. Ячейка B достигается при построении 16-го фронта волны. помечаются так же 1. Далее отметка 2 присваивается ячейкам фронта
помечаются так же 1. Далее отметка 2 присваивается ячейкам фронта  и т. д. (рис.7.10).
и т. д. (рис.7.10).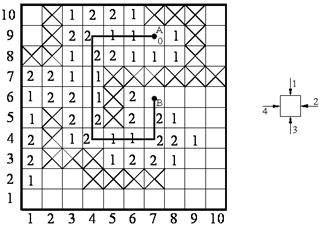
 ,
,  , …,
, …,  и
и  ,
,  , …,
, …,  считаются одноименными, если они распространяются из одноименных источников A или B. Лучи
считаются одноименными, если они распространяются из одноименных источников A или B. Лучи  и
и  являются разноименными по отношению друг к другу. Распространение лучей происходит одновременно из обоих источников до встречи двух разноименных лучей в некоторой точке C.
являются разноименными по отношению друг к другу. Распространение лучей происходит одновременно из обоих источников до встречи двух разноименных лучей в некоторой точке C. и
и  , то для луча
, то для луча 
 и
и