|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
СПЕКТРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ ПЕРИОДИЧЕСКИХ СИГНАЛОВСтр 1 из 2Следующая ⇒ Тема 1 ВВЕДЕНИЕ В настоящее время для анализа информации о состоянии биообъекта в биомедицинской практике широко применяются ЭВМ. В качестве переносчиков информации выступают биомедицинские сигналы. Многие биомедицинские сигналы имеют электрическую природу. Это биопотенциалы сердца, мозга, мышц. Биомедицинские сигналы, имеющие другую природу, могут быть преобразованы в электрические. Таким образом, переносчиком информации от биообъекта к устройству обработки и анализа этой информации (ЭВМ) являются электрические сигналы. Применение ЭВМ для обработки биомедицинских сигналов открывает новые возможности по выявлению более тонкой структуры сигналов, что способствует более точному диагностированию различных заболеваний. В то же время существующие методы обработки биомедицинских сигналов с помощью ЭВМ зачастую являются просто автоматизацией давно известных «ручных» методов. При этом получение дополнительной информации требует усложнения алгоритмов обработки биомедицинских сигналов, что в ряде случаев делает невозможным получение информации о состоянии биообъекта в реальном времени. Последнее особенно важно для палат интенсивной терапии, для физиотерапевтических кабинетов. Поэтому разработчики медицинской аппаратуры постоянно ведут исследования по созданию новых методов обработки биомедицинских сигналов, которые бы в полной мере учитывали структурные особенности последних и обеспечивали получение помехоустойчивых оценок состояния биообъекта в реальном времени. Ниже будут рассмотрены некоторые из разработанных в последнее время методов, применяемых при обработке электрокардиосигналов. 
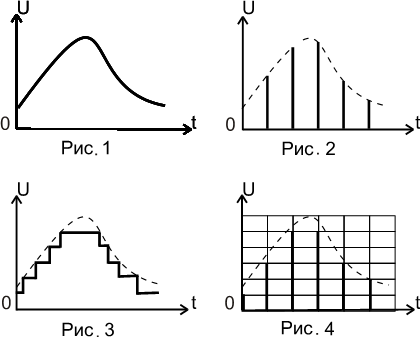
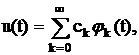
МОДЕЛИ СИГНАЛОВ Биомедицинские сигналы, как правило, изменяются во времени и по амплитуде непрерывно, т. е. являются так называемыми аналоговыми сигналами [1]. Сигналы делят на детерминированные и случайные. Детерминированными сигналами называют сигналы, мгновенные значения которых точно определены в любые моменты времени. Случайными сигналами называют сигналы, мгновенные значения которых заранее предсказать невозможно. Случайные изменения параметра могут вызываться либо передаваемым сообщением, либо действием каких-то мешающих факторов. В последнем случае говорят о действии помех на передаваемое сообщение. Параметры сигнала, изменяемые во времени в соответствии с передаваемым сообщением, называют информативными параметрами. У электрических сигналов информативнымипараметрами могут быть амплитуда, частота (период), фаза (временной сдвиг). Информацию могут нести только случайные сигналы. Детерминированный сигнал никакой информации не несет, поскольку его поведение заранее известно. Однако использование детерминированных сигналов удобно при изучении процессов, связанных с преобразованием, передачей и обработкой сигналов, несущих информацию, и устройств, осуществляющих эти преобразования. При изучении общих свойств сигналов мы отвлекаемся от их конкретной физической природы, содержания и назначения и заменяем сигналы моделями. Модель – это выбранный способ описания объекта, процесса или явления, отражающий существенные с точки зрения решаемой задачи факторы. В качестве моделей электрических сигналов используют математические модели. Рассмотрим формы представления детерминированных сигналов. По форме представления детерминированные сигналы делят на непрерывные, дискретные и дискретно-непрерывные. Непрерывный сигнал. Если число возможных значений параметра бесконечно, то сигнал считают непрерывным по этому параметру. Дискретный сигнал. Если число возможных значений параметра конечно, то сигнал называют дискретным по данному параметру. Дискретно-непрерывный сигнал. Сигнал, дискретный по одному параметру и непрерывный по другому, называют дискретно-непрерывным. В соответствии с перечисленными формами представления детерминированных сигналов существуют следующие разновидности их математических моделей. 1. Непрерывная функция непрерывного аргумента. Например, непрерывная функция времени u(t) (рис. 1). 2. Непрерывная функция дискретного аргумента. Например, функция, значения которой отсчитываются только в определенные моменты времени u(kT), где k=0, 1,2,…, T – время между отсчетами (рис. 2). 3. Дискретная функция непрерывного аргумента. Например, функция времени, квантованная по уровню Um(t), где m=0, 1, 2, …, M, M – возможное число уровней (рис. 3). 4. Дискретная функция дискретного аргумента. Например, функция принимает одно из значений конечного множества М возможных значений (уровней) в определенные (дискретные) моменты времени Um(kT) (рис. 4). Переход от одной формы представления сигналов к другой осуществляется с помощью соответствующих операций. Биомедицинские сигналы имеют весьма разнообразные диапазоны изменения амплитудных значений. Например, сигналы электроэнцефалограммы имеют амплитудный диапазон от 10 до 200 мкВ, а сигналы электрокардиограммы – от 100 мкВ до 5 мВ [2]. Поэтому прежде чем перейти к преобразованию сигналов последние надо представить в каком-то единообразном виде, т. е. нормализовать. Это позволит применить один и тот же преобразователь, например аналого-цифровой, для сигналов от разных датчиков. Нормализация сигналов – это ряд операций по представлению информации от разных датчиков в виде единых по уровню электрических сигналов,
отвечающих заданным требованиям. Наиболее типовые требования: определенный диапазон изменения амплитуды сигнала и определенное отношение сигнала к шуму (С/Ш). Нормализация сигналов осуществляется с помощью операций усиления и фильтрации. Дискретизация сигналов – это операция преобразования непрерывных во времени и по амплитуде сигналов (рис. 1) в сигналы, непрерывные по апмлитуде и дискретные во времени. При этом непрерывные сигналы представляются в виде отдельных дискретных отсчетов, то есть отсчетов, взятых через определенные отрезки времени (рис. 2). Дискретизация сигналов – первый шаг на пути от датчика сигнала к ЭВМ. Квантование сигналов или аналого-цифровое преобразование – это операция по замене текущего значения амплитуды сигнала или его дискретного отсчета соответствующим значением шкалы квантования (рис. 3, рис. 4). Шкала квантования содержит конечное число N уровней квантования. Операция квантования связана с округлением значения непрерывной величины в соответствии с принятыми правилами (например, отнесение к ближайшему уровню квантования, нижнему или верхнему, или к нижнему уровню квантования). В свою очередь, каждый уровень квантования может быть представлен числом, обозначающим его номер. Если число представлено в виде двоичного кода, то в результате аналого-цифрового преобразования непрерывный сигнал представляется в виде двоичного кода, т. е. становится цифровым. После обработки биомедицинских сигналов средствами цифровой вычислительной техники содержащаяся в них информация должна быть представлена врачу, исследователю. Человеку же удобнее оперировать не с «0» и «1», а с таблицами, графиками и т. п. Поэтому необходимо сделать обратное преобразование сигнала из цифрового вида в непрерывный, чтобы, например, построить график. Для этого сначала цифровой сигнал с помощью цифроаналогового преобразователя (ЦАП) преобразуется в дискретный (импульсный) сигнал, а затем из дискретного сигнала получают непрерывный сигнал. Преобразование дискретного сигнала в непрерывный осуществляют с помощью операций интерполяции или фильтрации. Фильтрация, как отмечалось выше, используется еще при нормализации сигналов для повышения отношения С/Ш. Преобразование сигналов из непрерывных в цифровые и обратно связано с изменением спектрального состава сигналов. Поскольку большинство биомедицинских сигналов имеет выраженную периодичность, для изучения общих вопросов преобразования и обработки таких сигналов рассмотрим спектральное представление периодических сигналов в различных базисах. СПЕКТРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ ПЕРИОДИЧЕСКИХ СИГНАЛОВ
Обобщенный спектр
Рассмотренные модели сигналов в виде функций времени предназначены в первую очередь для анализа формы сигнала. Реальные сигналы часто имеют достаточно сложную форму (например, сигнал ЭКГ). При исследовании прохождения таких сигналов через радиоэлектронные устройства желательно было бы иметь такое представление сигналов, которое упростило бы это исследование. Для этого сигнал сложной формы удобно представить в виде совокупности каких-то элементарных сигналов. На практике наибольшее применение нашло представление непрерывного сигнала сложной формы u(t), заданного на интервале (t1,t1+T), где Т – период повторения сигнала, в виде линейной комбинации некоторых элементарных функций jk(t), k=0, 1, 2, …[3]
где сk – некоторый безразмерный коэффициент, k – порядковый номер функции в системе {jk(t)}. Функции jk(t) называют базисными. При выбранном наборе базисных функций непрерывный сигнал u(t) полностью определяется совокупностью коэффициентов ck. Совокупность коэффициентов ck называют дискретным спектром сигнала, а представление сигнала в виде (1) называют обобщенным спектральнымпредставлением или разложением сигнала по системе базисных функций {jk(t)}. Такое представление сигнала удобно для изучения линейных систем. Оно позволяет находить реакцию системы, т. е. сигнал на ее выходе, на любой сложный входной сигнал. Для этого определяют реакцию на каждое элементарное воздействие, полученные результаты умножают на коэффициенты ck и суммируют, поскольку линейные системы удовлетворяют принципу суперпозиции. Требования к базисным функциям: - для любого сигнала ряд (1) должен сходиться, - коэффициенты ck должны легко вычисляться, - значения коэффициентов ck не должны зависеть от верхнего предела суммы (1). Указанным требованиям удовлетворяет так называемая полная, упорядоченная система линейно независимых функций. Система функций jk(t), k=0, 1, 2, …, N-1, называется линейно независимой, если равенство Упорядоченность означает, что всегда по некоторому признаку можно определить, какая функция является предыдущей, а какая – последующей. Система линейно независимых функций является полной, если к ней нельзя добавить ни одной новой функции, которая была бы линейно независимой по отношению к функциям рассматриваемой системы. Если система окажется неполной, то не все сигналы можно представить в виде (1). Например, если мы разложим сигнал по первым 5 гармоникам, то мы не сможем узнать о наличии в сигнале более высокочастотных гармоник. Неполную систему всегда можно дополнить введением новых функций. В пределе можно получить полную систему. Коэффициенты ряда (1) просто вычисляются, если в качестве базиса использовать систему ортогональных функций. В общем случае функции jk(t), k=0, 1, 2, …, заданные на интервале t1 £t£t1+T, называют ортогональными на этом интервале, если выполняется условие
где dkj – символ Кронекера, равный 1 при k=j и 0 при k¹j, * - символ комплексной сопряженности. Постоянная Ek физически соответствует энергии сигнала jk(t). Величину Для действительных функций jk(t), k=0, 1, 2,…, условие ортогональности имеет вид Система ортогональных функций является частным случаем системы линейно независимых функций. На практике часто пользуются ортонормированнойсистемой функций {yk(t)}, которая образуется из системы ортогональных функций {jk(t)} нормировкой каждой функции по ее норме, т. е. делением на норму
Коэффициенты ряда (1) находятся следующим образом. Умножим обе части равенства (1) на jj*(t) и проинтегрируем на интервале (t1, t1+T):
С учетом выражения (3) получим При использовании ортонормированной системы
Представление сигнала в виде (1) называют обобщенным спектром Фурье. Коэффициенты сj, определяемые (6) или (7), называют обобщенными коэффициентами Фурье.Совокупность коэффициентов сj и порядковых номеров функций называют обобщенным спектром сигнала.
|
||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 364. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 t1 £t£t1+T, (1)
t1 £t£t1+T, (1) 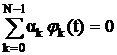 (2) справедливо лишь при ak=0 для всех k. Это значит, что никакую функцию этой системы нельзя представить в виде линейной комбинации других функций этой же системы.
(2) справедливо лишь при ak=0 для всех k. Это значит, что никакую функцию этой системы нельзя представить в виде линейной комбинации других функций этой же системы.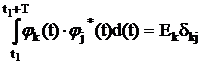 , (3)
, (3) называют нормой базисной функции jk(t).
называют нормой базисной функции jk(t). . (4)
. (4)
 . (5)
. (5) .
. , j=0, 1, 2, … (6)
, j=0, 1, 2, … (6) , j=0, 1, 2, … (7)
, j=0, 1, 2, … (7)