|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Рекомендации по выполнению курсовой работыСтр 1 из 2Следующая ⇒ ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Методические указания к курсовой работе
Направление подготовки дипломированных специалистов 220000 – «Автоматика и управление», специальность 220201 - «Управление и информатика в технических системах»
Коломна, 2010 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственного образовательного учреждения высшего профессионального образования Коломенский институт (филиал) «Московский государственный открытый университет» Кафедра автоматики и электроники в машиностроении
«УТВЕРЖДЕНО» Учебно-методическим Советом КИ МГОУ Председатель Совета
__________________
____________ 2010 г.
Мяльдзин Н.Х.
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
Методические указания к курсовой работе
Коломна 2010
Теория автоматического управления: Методические указания для студентов очной и очно-заочной формы обучения по специальности 220201 - Управление и информатика в технических системах: Сост. Мяльдзин Н.Х. – Коломна: КИ (ф) МГОУ, 2010. – 14 с.  Методические указания составлены в соответствии с Государственными образовательными стандартами высшего профессионального образования по направлению подготовки дипломированного специалиста 220201 – «Управление и информатика в технических системах». Методические указания одобрены на заседании кафедры «Автоматика и электроника в машиностроении» Коломенского института (филиала) МГОУ (протокол № 5 от 20.10.09) и утверждена учебно-методическим советом.
УДК 681.5 ББК 32.97 © Мяльдзин Н.Х. © КИ (ф) МГОУ, 2010
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАБОТЫ
Название работы Расчет параметров нелинейной системы автоматического управления
Цель работы 1. Изучение методов линеаризации нелинейных статических характеристик звеньев. 2. Изучение методов определения параметров автоколебаний в нелинейных САУ.
Разделы курса Для выполнения работы необходимо изучить разделы курса: «Типовые нелинейности»; «Автоколебания в нелинейных САУ»; «Метод гармонической линеаризации».
Список рекомендованной литературы 1. В.А.Бесекерский, Е.П.Попов. Теория систем автоматического управления. – СПб.: Изд-во «Профессия», 2003.-747с. 2. Методы классической и современной теории автоматического управления: Учебник для вузов в 3-х томах/Под редакцией Н.Д.Егупова. М.: Изд-во МГТУ им. Н.Э.Баумана, 2002. 3. Теория автоматического управления. Под редакцией А.А. Воронова. – М.: Высшая школа. 1986. – ч .1 - 367с., ч.2 – 504с. 4. Сборник задач по теории автоматического регулирования и управления. Под редакцией В.А. Бесекерского. – М.: Наука, 1978. - 511с.
Описание работы Курсовая работа представляет собой расчет нелинейной САУ с двухпозиционным регулятором. Рассчитывается система автоматической стабилизации сил натяжения кромок движущейся ленты ткани. Принципиальная схема системы показана на рис.1.
Рис.1
Принцип действия САУ Движущаяся ткань последовательно обходит ролики 1 и 2. Ролик 2 может поворачиваться вокруг вертикальной оси двигателем М со встроенным редуктором. Это приводит к изменению разности сил натяжения левой и правой кромок ткани на выходе из системы. Обозначается эта разность сил - f(t). Она представляет собой ошибку регулирования. Измеряется датчиком Д и выдается в регулятор Р в форме электрического напряжения:
где kD – коэффициент передачи датчика. Регулятор Р представляет собой электрическое реле и выходной сигнал описывается следующим математическим выражением:
где U(t) – электрическое напряжение на выходе регулятора; Напряжение U(t) поступает на управляющую обмотку двигателя М и обеспечивает через редуктор поворот ролика 2 в таком направлении, чтобы обеспечить уменьшение разности сил натяжения кромок ткани f(t). Двигатель с редуктором и нагрузкой описывается уравнением:
где j(t) – угол поворота ролика 2 вокруг вертикальной оси; fв(t) – случайно изменяющаяся во времени разность сил натяжения левой и правой кромок ткани на входе системы, т.е. перед роликом 1 (возмущающее воздействие); k1 – коэффициент передачи по управляющему воздействию; k2 – коэффициент передачи по возмущающему воздействию; T – постоянная времени двигателя. Разность сил натяжения ткани на выходе из системы за роликом 2 вблизи датчика Д связана с разностью сил натяжения ткани на входе системы перед роликом соотношением:
где k3 - постоянный коэффициент преобразования угла поворота валика 2 в разность сил натяжения. Величину напряжения «с» на выходе регулятора необходимо определить в процессе выполнения курсовой работы. Задание 1. Используя заданное математическое описание элементов составить структурную динамическую схему рассматриваемой системы управления. Преобразовать структурную схему таким образом, чтобы на ней было показано задающее воздействие 2. С целью исследования автоколебаний, привести схему к расчетной, содержащей линейную и нелинейную части. При выполнении считать 3. Используя метод гармонической линеаризации, получить гармоническую передаточную функцию нелинейного элемента. 4. Найти наибольшую величину C, при которой амплитуда колебаний ролика не превосходит допустимого значения D. Определить частоту и амплитуду таких колебаний. 5. Построить зависимость амплитуды и частоты автоколебаний от величины напряжения регулятора. Выбрать рабочее значение этого напряжения. 6. Провести исследование влияния варьируемых параметров системы на параметры автоколебаний. Варианты заданий приведены в таблицах.
Таблица вариантов №1 Регулятор описывается математическим выражением:
b и c - постоянные параметры статической характеристики реле. График зависимости
Рис.2 Численные значения параметров приведены в таблицах 1.1 и 1.2. Таблица 1.1
Таблица 1.2
Таблица вариантов №2 Регулятор описывается математическим выражением:
b1, b2 и c - постоянные параметры статической характеристики реле. График зависимости
Рис. 3
Численные значения параметров приведены в таблицах 2.1 и 2.2.
Таблица 2.1
Таблица 2.2
Рекомендации по выполнению курсовой работы 1. Для определения автоколебаний рекомендуется использовать частотный метод Л.С.Гольдфарба. 2. При расчетах принять коэффициенты гармонической линеаризации: - для статической характеристики «реле с гистерезисом»
- для статической характеристики «реле с зоной нечувствительности и с гистерезисом»
3. При выборе рабочего значения напряжения регулятора необходимо выбирать стандартные значения напряжения источников питания.
К.т.н., доцент
Мяльдзин Нури Хамзядинович
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 277. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 ,
, ,
, – нелинейная статическая характеристика регулятора.
– нелинейная статическая характеристика регулятора. ,
, ,
, (соответствующее идеальному алгоритму управления
(соответствующее идеальному алгоритму управления  ), а возмущение поступало в замкнутый контур системы в одном месте.
), а возмущение поступало в замкнутый контур системы в одном месте. , т.к. автоколебания представляют собой свободное движение системы.
, т.к. автоколебания представляют собой свободное движение системы.
 показан на рис.2.
показан на рис.2.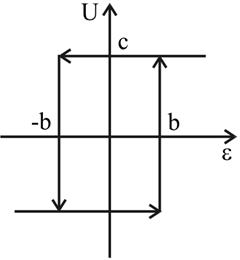

 ,
,  .
.
