|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
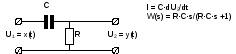
Б) типовые динамические звенья систем РАУ и их характеристики: дифференцирующее1. А)Современная классификация систем РАУ. I. Принципы метода работы 1. Принципы автоматического управления a) Разомкнутый контур управления (сигнал идет на выход) · Программное · Управление по возмущения b) Замкнутый контур управления (часть энергии с выхода возвращается на вход) 2. Виды законов управления · Пропорциональный регулятор · Интегрирующий регулятор · Пропорционально-интегрирующий регулятор · Пропорционально-дифференцирующий регулятор · Пропорционально-интегрирующий-дифференцирующий 3. Режим назначения систем · Информационный · Система программного управления ( во времени, в пространстве, смешанное) · РАУ автоматической стабилизации · Система автоматического слежения · Система с поиском экстремума · Система оптимального управления · Конвертированные системы · Адаптивные системы 4. Специальные условия · Прямые / косвенные · Активные / пассивные · Открытые / закрытые II. Виды сигналов 1) Аналоговый 2) Дискретный 3) По информации · AM · FM · PM 4) По внешнему воздействию · Функциональный · Количественный III. Методы обработки 1) Аналоговые 2) Цифровые 3) Базы данных IV. Математическая поддержка · Линейная система · Нелинейная система б) типовые динамические звенья систем РАУ и их характеристики: дифференцирующее Типовые динамические звенья – это минимально необходимый набор звеньев для описания системы управления произвольного вида. К типовым звеньям относятся: · пропорциональное звено; · апериодическое звено I-ого порядка; · апериодическое звено II-ого порядка;  · колебательное звено; · интегрирующее звено; · идеальное дифференцирующее звено; · форсирующее звено I-ого порядка; · форсирующее звено II-ого порядка; Дифференцирующее звено 1. Передаточная функция. Передаточная функция дифференцирующего звена имеет вид: W(s) = T·sгде T – постоянная времени (время дифференцирования). 2. Математическое описание звена. Дифференцирующее звено описывается уравнением, в котором встречается производная от входного сигнала: у = T·dх(t)/dt Это не дифференциальное уравнение, поскольку входной сигнал х(t) и его производные полагаются заранее известными. 3. Физическая реализация звена. Поскольку идеальное дифференцирующее звено физически нереализуемо, при этом сама операция дифференцирования часто встречается при описании процессов разной природы, то на практике часто используют "нетиповое" реальное дифференцирующее звено.Реальное дифференцирующее звено является соединением двух типовых звеньев - идеального дифференцирующего и инерционного, которые вместе приближённо описывающих операцию дифференцирования. Передаточная функция реального дифференцирующего звена имеет вид: W(s) = T1s/(T2s + 1),где T1 – постоянная времени дифференцирующей составляющей (время дифференцирования), а T2 – постоянная времени апериодической составляющей. При малых значениях T2, т.е. когда инерционность апериодического звена мала, составляющей T2s в знаменателе передаточной функции можно пренебречь, тогда мы получим приближенную передаточную функцию идеального дифференцирующего звена: W(s) = T1s/(T2s + 1) ≈ T1s. Такое звено хорошо работает при низких частотах. Максимальная частота, при которой реальное дифференцирующее звено еще работает "почти как идеальное" равна: ω = 1/T2. Примерами дифференцирующего звена являются дифференцирующая цепочка, дифференцирующий трансформатор, операционный усилитель в режиме дифференцирования.
Переходная функция. h(t) = L-1[W(s)/s] = L-1[T] = T·δ(t) Таким образом, реакция дифференцирующего звена на ступенчатую функцию – это короткий импульс. Весовая функция. w(t) = L-1[W(s)] = L-1[T·s] = T·dδ(t)/dt Переходную и весовую функцию дифференцирующего звена трудно изобразить графически, и тем более сложно представить, каков отклик (реакция) этого звена на входное воздействие. Поэтому рассмотрим отклик дифференцирующего звена на линейное (нарастающее) входное воздействие: х(t) = t Х(s) = 1/s2. у(t) = L-1[W(s)·Х(s)] = L-1[T·s/s2] = L-1[T/s] = T·1(t).
Другими словами, если на вход дифференцирующего звена подать линейно нарастающий сигнал, то в момент подачи сигнала на выходе мы будем иметь скачок выходного сигнала с 0 до T. Частотные характеристики.
Рис. 5.1. АФЧХ, ЛАХ и ЛФХ дифференцирующего звена. W(jω) = T·j·ω = 0 + Tω·j A(ω) = Tω φ(ω) = arctg(Tω/0) arctg(∞) = π/2 L(ω) = 20lg[A(ω)] = 20lg(Tω). Как видим, частотные характеристики дифференцирующего звена обратны частотным характеристикам интегрирующего звена. |
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 359. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |