|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Шихтовка железа стержневого трансформатора
Однофазный
Трехфазный
Броневой трансформатор
1321 Первая цифра – по структурному состоянию и прокату: 1. горячекатаная изотропная; 2. холоднокатаная изотропная; 3. холоднокатаная анизотропная с ребровой структурой. Вторая цифра – содержание кремния: 1. до 0,8 %; 2. 1,8 – 2,8 %; 3. 2,8 – 3,8 %; 4. 3,8 – 4,8 %. Третья цифра – характеризует удельные потери : 1. нормальные потери; 2. низкие потери; 3. пониженные потери; Четвертая цифра – порядковый номер типа стали. Обмотки (однослойные и многослойные):
б) цилиндрические
Билет 13. Вопрос 2.Приведение рабочего процесса АМ к рабочему процессу трансформатора с переменной активной нагрузкой Схема замещения позволяет определить токи, потери мощности и падения напряжения в асинхронной машине. При этом нужно учитывать, что в обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения. Из электрической схемы замещения ротора при его вращении следует, что ток ротора I2 = E2s /Z2 = E2s / При вращении ротора ЭДС E2s в обмотке ротора и ее частота пропорциональны скольжению s. Следовательно, и индуктивное сопротивление обмотки ротора зависит от скольжения: Х2s = 2πf2 L2 = 2πf1 L2 s = X2 s , (4.31) где Х2 — индуктивное сопротивление обмотки заторможенного ротора.
Подставляя значения Е2s и Х2s в (4.30), получаем  I2 = sE2 / В числителе и знаменателе (4.32а) есть переменная величина s, поэтому преобразуем его к виду I2 = E2 / Уравнению (4.326) соответствует электрическая схема замещения, показанная на рис. 4.14,6. Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/s изменяется в зависимости от скольжения. Схемы, представленные на рис. 4.14, а и б, с энергетической точки зрения не эквивалентны. Так, в схеме, приведенной на рис. 4.14, а, электрическая мощность ротора Рр равна электрическим потерям Рр = ΔРэл2 = m2 I22 R2 , (4.33a) а мощность, потребляемая в схеме, приведенной на рис. 4.14,6, Р'р = m2 I22 R2 /s. (4.33б) Отношение этих мощностей Рр /Р'р = ΔРэл2 /Р'р = m2 I22 R2 /(m2 I22 R2 /s ) = s . Однако, поскольку s = ΔРэл2 /Рэм, получим, что Р'р = Рэм . Следовательно, электрическая мощность Р'р в схеме, представленной на рис. 4.14,6, равна всей электромагнитной мощности, подводимой от статора к ротору. По известным величинам ΔРэл2 и Рэм можно определить и механическую мощность ротора: Рмех = Рэм - ΔРэл2 = m2 I22 R2 /s - m2 I22 R2 = m2 I22 R2 (1 - s)/s. (4.34) Полученный результат наглядно представлен электрической схемой (рис. 4.14, в), в которой активное сопротивление обмотки ротора состоит из двух частей: R2 и R2(1 - s)/s. Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя. Таким образом, рассматриваемая схема замещения позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящее от частоты вращения ротора.
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно Пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Холостой ход. Режимы работы АМ при заторможенном роторе наиболее просты для исследования, так как при этом обмотки статора и ротора пересекаются магнитным потоком с одной и той же скоростью, т. е. частоты ЭДС статора f1 и ротора f2 равны. Если считать, что вращающееся магнитное поле близко к круговому и, кроме того, высшие гармонические ЭДС подавляются из-за распределения обмоток в нескольких пазах и укорочения шага, то при анализе можно учитывать только первые гармонические ЭДС статора и ротора соответственно Е1 = 4,44f1 w1 kо61 Фm ; (4.2) Е2 = 4,44f1 w2 kо62 Фm . (4.3) Отношение E1 /E2 = w1 koб1 /(w2 koб2 ) = kE (4.4) называют к-том трансформации ЭДС. Для основных гармонических обмоточные к-ты обычно равны 0,96—0,90 и поэтому в первом приближении можно считать kE = w1 /w2 (4.5) аналогично тому, как это наблюдается в трансформаторе. Если обмотка ротора разомкнута, то по ней ток не проходит, а следовательно, она не влияет на электромагнитные процессы в статоре. Этот режим называют режимом холостого хода. При холостом ходе для каждой фазы обмотки статора можно составить уравнение, полностью тождественное уравнению для первичной обмотки трансформатора при холостом ходе: Ú1 + É1+ Éσ1 = Í0R1 (4.6)
Рис. 4.7. Векторные диаграммы АМ при заторможенном роторе Ток холостого хода I0 в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в т-торе (20 - 40% от ном тока по сравнению с 0,5 - 3% у т-тора), вследствие чего здесь нельзя пренебрегать падениями напряжения Í0R1 и jÍ0X1 и пользоваться приближенным уравнением Ú1 + É1 = 0, как это делают в некоторых случаях при построении векторной диаграммы трансформатора. Для снижения тока холостого хода заводы-изготовители стремятся выполнять в асинхронных машинах минимально возможные зазоры. У двигателей мощностью 5 кВт и менее зазоры между статором и ротором равны 0,1—0,3 мм. При построении векторных диаграмм асинхронной машины принимают, что потоки рассеяния Фσ1 и Фσ2 , создаваемые обмотками статора и ротора, совпадают по фазе с токами, проходящими по соответствующим обмоткам, и пропорциональны этим токам аналогично тому, как это принято в теории трансформатора. Поэтому в асинхронной машине, так же как и в трансформаторе, можно считать, что при режимах, близких к номинальному, индуктивные сопротивления Х1= Еσ1 /I1 и X2 = Eσ2 /I2 не зависят от тока в соответствующих обмотках. Работа машины под нагрузкой. Асинхронную машину с заторможенным ротором можно использовать в качестве трансформатора, если в цепь обмотки ротора (вторичной обмотки) включить сопротивление нагрузки Zн. Векторная диаграмма асинхронной машины с заторможенным ротором (рис. 4.7,6) аналогична диаграмме трансформатора и определяется формально теми же основными уравнениями:
Однако наличие в асинхронной машине вращающегося потока обусловливает некоторые специфические особенности. Поскольку фазы обмотки ротора сдвинуты в пространстве, а токи в них имеют временной сдвиг, они создают бегущую волну МДС ротора F2, частота вращения которой nF2 = 60f2 /р2 , (4.8) где f2 и р2 — частота тока и число пар полюсов ротора. Так как при неподвижном роторе ЭДС в обмотках статора и ротора имеют одинаковую частоту, т. е. f2 = f1, то nF2 = 60f1 /р2 . Асинхронная машина может работать только при равенстве частот вращения бегущих волн МДС статора F1 и ротора F2. Следовательно, статор и ротор должны иметь одинаковое число полюсов, т. е. p1 = p2 = p. При этом условии бегущие волны МДС ротора и статора неподвижны одна относительно другой и взаимодействуют между собой, обеспечивая передачу мощности из статора в ротор так же, как и в трансформаторе. В результате ток ротора I2 создает компенсирующую его составляющую тока статора I'2 и результирующий магнитный поток остается примерно таким же, как и при режиме холостого хода. Таким образом, для асинхронной машины, как и для трансформатора, справедливо условие Ф ≈ const, т. е. магнитный поток при изменении режима работы изменяется мало. Схема замещения (рис. 4.8). Эта схема аналогична схеме замещения трансформатора, но ее параметры определяются другими коэффициентами приведения. Полагая Е'2 = E1 = kЕЕ2, из условия равенства мощностей реального и приведенного роторов m2E2I2 = m1Е'2I2 находим 1'2 = (m2 /m1 )• (E2 /Е'2 )•I2 = m2 w2 kоб2 I2 /(m1 w1 kоб1 ) = I2 /ki . (4.9) Величину ki = m1 w1 kоб1 /(m2 w2 kоб2 ) называют коэффициентом приведения (трансформации) токов. Из равенства электрических потерь m2 I22 R2 = m1 I'22 R'2 получаем R'2 = (m2 /m1 ) (I2 /I'2 )2R2 = ki kЕ R2 . (4.10) Из равенства относительных индуктивных падений напряжений I2 Х2 /Е2 = I'2 Х'2 /Е'2 находим Х'2 = (Е'2 /Е2 ) (I2 /I'2 ) X2 = ki kE X2 . (4.10a) Величину kEki называют коэффициентом приведения сопротивлений. При определении коэффициентов kE и ki для короткозамкнутой обмотки типа беличья клетка принимают w2 = 0,5;m2 = z2 и kо62 = 1. Таким образом, теория работы асинхронной машины с заторможенным ротором в основном подобна теории работы трансформатора. Однако использование АМ в качестве трансформатора обычно нецелесообразно, так как она значительно дороже трансформатора и имеет худшие эксплуатационные характеристики (больший ток холостого хода, меньший КПД и пр.). Только в некоторых специальных устройствах асинхронную машину используют в режиме работы трансформатора, т. е. при заторможенном роторе. Области применения. Рассмотренный режим работы используют в фазорегуляторах и индукционных регуляторах. Асинхронные фазорегуляторы (рис.4.9,в) используют главным образом в схемах автоматики для компенсации фазовой погрешности, в управляемых выпрямителях, устройствах для испытаний электроизмерительных приборов и пр.
Билет 14. Вопрос 2.Распределение нагрузки между трансформаторами при параллельной работе |
|||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 264. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


 Марка стали (пример).
Марка стали (пример). а) дисковые у броневого трансформатора
а) дисковые у броневого трансформатора
 в) винтовые г)непрерывные
в) винтовые г)непрерывные . (4.30)
. (4.30)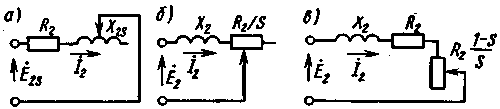
 . (4.32a)
. (4.32a) . (4.32б)
. (4.32б)

 Полная схема замещения асинхронной машины при вращающемся роторе отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 4.15, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. Векторная диаграмма для Т-образной схемы замещения приведена на рис. 4.15,6.
Полная схема замещения асинхронной машины при вращающемся роторе отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 4.15, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. Векторная диаграмма для Т-образной схемы замещения приведена на рис. 4.15,6.

 где Е1 — ЭДС, индуцируемая вращающимся магнитным потоком Ф, охватывающим обмотки ротора и статора; Еσ1 = 4,44f1 kоб1 w1 Фσ1т — ЭДС, вызываемая потоком рассеяния обмотки статора; I0R1 — падение напряжения в обмотке статора, называемое током холостого хода. В соответствии с (4.6) можно построить векторную диаграмму АМ при холостом ходе (рис. 4.7, а). При этом вектор Еσ1 заменяют противоположно направленным ему вектором jÍ0Х1 индуктивного падения напряжения в обмотке статора.
где Е1 — ЭДС, индуцируемая вращающимся магнитным потоком Ф, охватывающим обмотки ротора и статора; Еσ1 = 4,44f1 kоб1 w1 Фσ1т — ЭДС, вызываемая потоком рассеяния обмотки статора; I0R1 — падение напряжения в обмотке статора, называемое током холостого хода. В соответствии с (4.6) можно построить векторную диаграмму АМ при холостом ходе (рис. 4.7, а). При этом вектор Еσ1 заменяют противоположно направленным ему вектором jÍ0Х1 индуктивного падения напряжения в обмотке статора.